What it’s about
This tutorial is all about the cyber:bot robot’s servo motors. First, you will calibrate or “center” the servo motors. Next, you will learn how control signals make the servos rotate at different speeds and directions. Then, you will be able to write programs to make the robot drive.
Before you start
You will need:
- Your programming software set up, with your micro:bit ready to use the cyber:bot module
- A fully built cyber:bot robot with Parallax Continuous Rotation servos
- Parallax screwdriver
After you finish
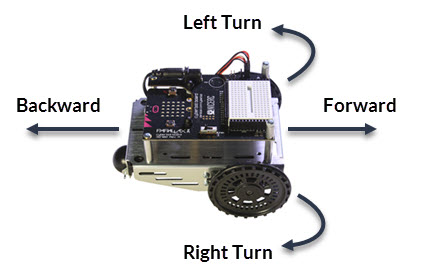
Once you understand how the servos work, you will be able to write scripts that make the robot drive forward, backward, and turn left or right. You will be ready to combine servo movement with sensor input in the next tutorials, so your cyber:bot can navigate on its own.
Curriculum
- 1 Section
- 4 Lessons
- Lifetime
Expand all sectionsCollapse all sections
