Swap and Test the Servos

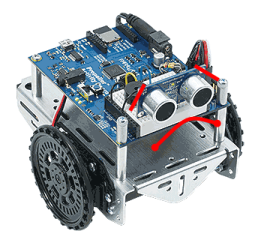
In this activity, you will remove the cyber:bot robot’s existing continuous rotation servos and replace them with Feedback 360° servos. … Read more
In this activity, you will remove the cyber:bot robot’s existing continuous rotation servos and replace them with Feedback 360° servos. … Read more
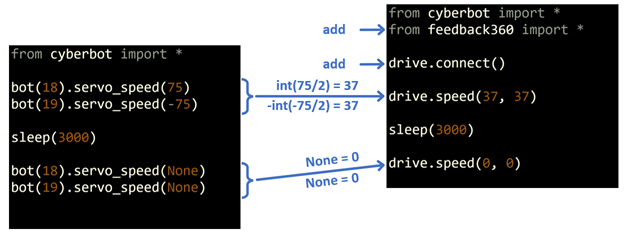
At this point, you might be wondering how to modify an existing script to make it work with Feedback 360° … Read more
Hardware Setup Set the cyber:bot board’s power (PWR) switch to Position 0. Make sure the battery holder is loaded with … Read more
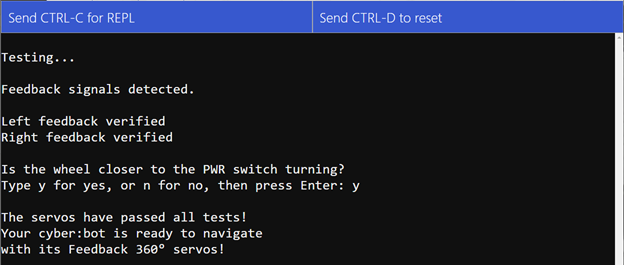
It’s time to test your Feedback 360° servos’ feedback signal connections, to make sure they are proper working order. If … Read more
It’s time to test your servos’ feedback signal connections. If all is well, the example program below will cause the … Read more
Only for FEEDBACK 360° SERVOS If you are using external encoders, go to External Encoder Test instead. It’s time to … Read more
Only for FEEDBACK 360° SERVOS If you are using external encoders, go to External Encoder Test instead. It’s time to … Read more
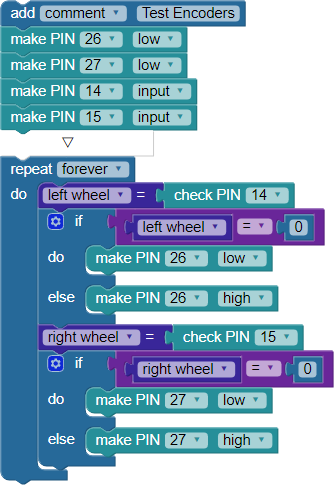
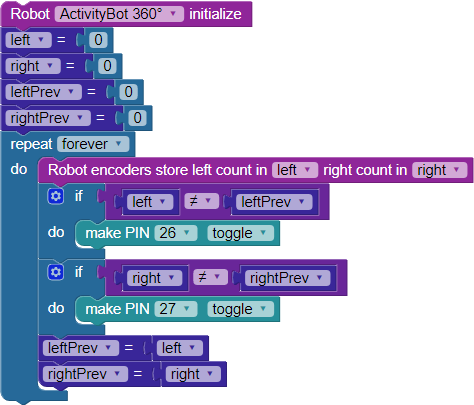
Only for External Encoders! If you are using Feedback 360° servos, go to Feedback 360° Servo Test instead. It’s time … Read more
Only for External Encoders! If you are using Feedback 360° servos, go to Feedback 360° Servo Test instead. This short … Read more
Is your ActivityBot having trouble? This page lists some of the most common problems encountered when calibrating the ActivityBot, or … Read more