Drive a Servo with the RC Receiver
A Beginner Hardware Hack
The easiest way to add a servo to your ELEV-8 v3 quadcopter is to drive it with a spare channel on the ELEV-8 v3’s receiver.
R/C receivers, such as the Spektrum AR610 6-Channel or the Spektrum AR8000 8-Channel receivers output a PWM (pulse-width modulated) signal that tell standard servos what position they should turn to and hold:

R/C servos are made to turn in a limited arc, no more than about 180°. You set the precise position of the output shaft of the servo motor by using the timing signal; this signal is provided by a microcontroller. Once the signal is applied, the motor moves to that position and stays there.
The control signal for a servo is a stream of pulses. The exact duration of these pulses, in fractions of a second, is what determines the position of the servo. Each pulse is nominally from 1000 to 2000 microseconds (μs) in duration — one microsecond is one millionth of a second. The pulses repeat about 50 times each second.
Your ELEV-8 v3 quadcopter needs 5 channels to fly: throttle, rudder, elevators, ailerons and gear/mode. If your transmitter and receiver have additional channels available, you can use a spare channel to drive a servo.
Your Turn
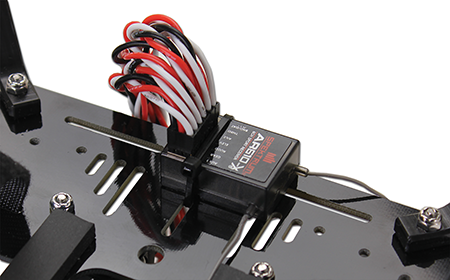
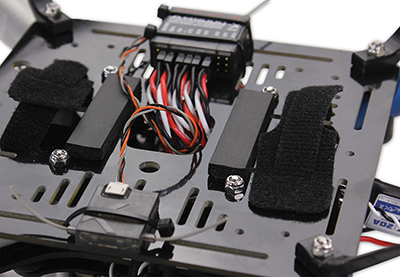
- Locate the receiver on your ELEV-8 v3 quadcopter. If you are using a Spektrum Receiver, it sould look like this:
or this:
If a cable is already connecting the channel labeled Aux 1 on your receiver to your flight controller, it is safe to remove it – it is not critical for flight using the standard firmware.
- Next, make sure that one of the switches or knobs on your transmitter is mapped to the Aux 1 channel. You may need to read the user manual for your transmitter for specific instructions. (Spektrum transmitter manuals can be found online here.)
STOP!
REMOVE THE PROPELLERS FROM YOUR QUADCOPTER BEFORE PROCEEDING!
- Remove all of the propellers from your quadcopter.
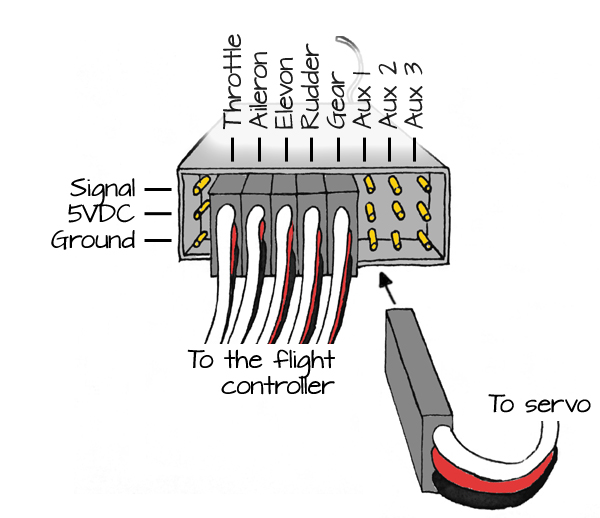
- Plug a servo into the Aux 1 channel on your receiver, as shown below. Be sure to align the black wire with ground:
- Turn on your transmitter and connect the battery to power up your ELEV-8 v3. Flip the switch or turn the knob on your transmitter that you mapped to the Aux 1 channel. Your servo should move when you flip the switch or turn the knob
Although this works well if your transmitter has knob, not all transmitters do. If you had to use a switch, you have noticed that you can only move the servo to 2 or 3 different positions.
By connecting that spare channel back up to the flight controller, you can modify the firmware on the flight controller to drive the servo in nearly any manner you choose.