Step 28 – Prepare Battery and Tray
The battery tray can accommodate either one or two 12 V, 8 amp-hour sealed lead acid batteries depending on your power and load requirements. Batteries such as the PowerSonic #1270 or equivalent work well.
If you are building a two-battery system, follow these instructions and the ones at the beginning of Step 29. If you’re only going to build a one-battery system, then follow these instructions for your single battery and refer to the Single Battery Configuration instructions at the end of Step 29. The Arlo Full Kit includes both the one and two-battery system components.
- Place (4) square rubber feet on both sides of each battery – that’s a total of (16) feet – 8 on each battery.

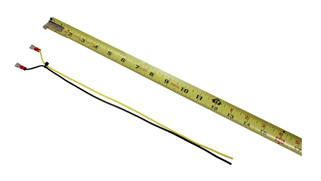
- Cut 4″ off of the black wire and 4″ off of the yellow wire (to be used for DHB-10 connections, later on). Set aside.
- Fold the remaining black wire in half and cut so you have two 13″ pieces.
- Fold the remaining yellow wire in half and cut so you have two 13″ pieces.
- Strip 1/4″ from both ends of the (2) black and (2) yellow wires.
- Crimp (or solder if you prefer) a ¼” female quick-connect to one end of the black wires and one end of the yellow wires as shown below. Using your wire crimper, firmly squeeze and crimp the terminal, causing it to bind to the bare wire. We also recommend that you solder the terminals to the wires (if possible) as this will be a stronger and more reliable connection.
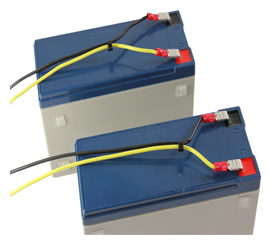
- Place a zip-tie about 1.5” from the end of the crimp terminals as shown above.
- Tape over the uncrimped, stripped wire ends so that no wire is exposed.
Important! Make sure you tape over the uncrimped wire ends (as mentioned above) – this will help prevent any accidental shorting of the batteries until they’re ready for their final connections. Be absolutely sure you have fully covered the exposed wire. Once connected to the batteries it is very important you do not allow wire ends to touch each other!
- Attach the wires to the batteries as shown. Be sure to observe the proper polarity: black is negative, connect it to the black battery terminal; the yellow wire should be connected to 12V positive.