Step 29 – Batteries and Tray
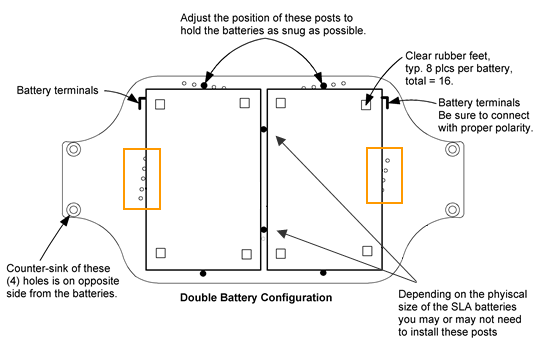
Standard Double-Battery Configuration
For the Single-Battery Configuration diagram, click here or scroll to the end of this step.
Before you install anything: the (4) counter-sunk side of the mounting holes (that fasten the tray to the bottom of the motor mount blocks) should be facing down (opposite side of where the batteries and standoffs are) so that the flat head screws will seat properly when the battery assembly is connected to the motor mount and wheel assemblies.
- Use the above diagram to install posts on the battery tray. Note the locations of the battery terminals as oriented on the tray.
Note: The physical size of the batteries (that are included in the Arlo Complete Robot System) may vary slightly due to battery manufacturing tolerances. Therefore, it may not be necessary or feasible to install the middle retention posts. If you choose not to install the central posts, there are other optional holes to install retention posts on the outsides of the battery tray (close to the terminals) which have been outlined in the above image with an orange box. Use the best configuration for your battery size and setup.
If you’re using the standard 12 V, 7.5 Ah sealed lead acid (SLA) batteries (that come with the Arlo Complete Robot System), the (included) 5/8” F/F standoffs and #4-40 x ½” long pan-head screws will hold them securely as shown. The staggered hole patterns accommodate slight dimensional variances between different brands of batteries. Use the (staggered) holes that provides for the tightest retention of each of the batteries.
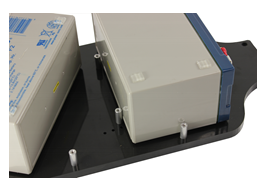
- Place the batteries on the tray with the retention posts to make sure there’s a snug fit, (shown with middle posts installed):
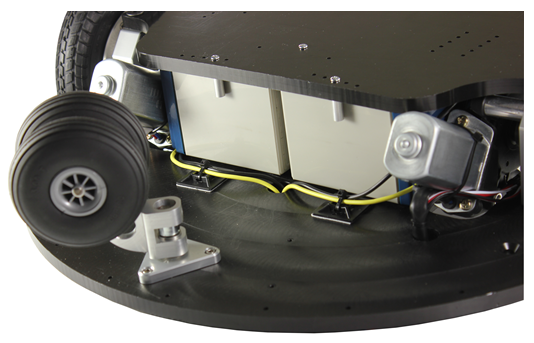
- Flip your Arlo base platform over and lay the batteries in between the motor mount assemblies, as shown here:

- Now place the battery tray over the batteries (with the standoffs separating them). Secure the tray to the motor mount blocks with (4) ¼”-20 x ¾”, flat socket-head screws – the same type of screw that was used to attach the motor assemblies to the Arlo base. Feed the battery wires through the hole as shown and be sure that the wire ends are still covered with tape to prevent any short circuits.


- Peel and stick a couple of zip-tie anchors to the bottom of the platform as shown below and secure the power wiring with a couple of zip ties from the Hardware Pack for Arlo.
This completes the installation of the batteries and the battery tray.
Single-Battery Configuration
If you wish to mount a single 12 battery to the Arlo Platform instead, use the following Single-Battery Configuration shown here:
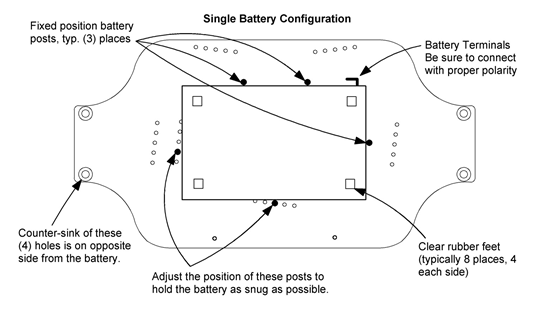
Complete battery tray installation by following the tray mounting-procedures as outlined in the double-battery configuration instructions, above.