Step 34 – Wiring the DHB-10 Power Connections
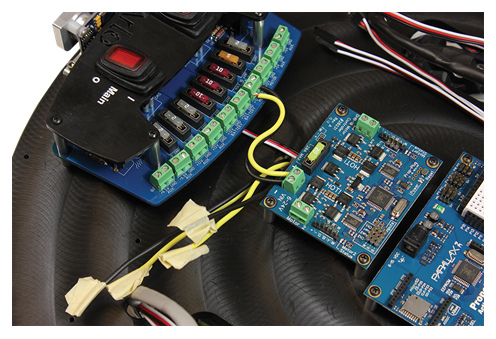
As shown above, we’re using black wires for ground, or negative battery, and we’re using yellow wires for +12 volts or positive battery power.
The DHB-10 Motor Controller runs on +12V so we’re connecting the black wire to ground and the yellow wire to the +12V terminal labeled ”Motor” that has the 10 amp fuse capability.
- Take the 4” black and yellow wires you set aside in Step 28.
- Strip off about 1/4” of insulation on both ends of each wire and insert them into the appropriate terminal blocks on the DHB-10 and the Power Distribution Board. Tighten.
IMPORTANT: Observe proper polarity!