Test Propeller to DHB-10 Communication
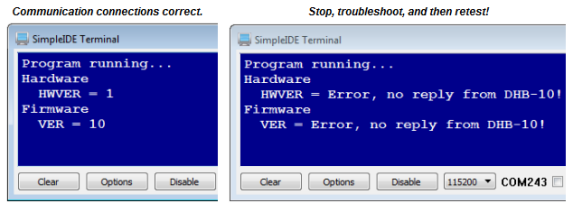
This next program asks the DHB-10 for its hardware and firmware versions, and displays the results in the SimpleIDE Terminal. Here is what you’ll see if your Activity Board’s Propeller microcontroller communicates successfully with the DHB-10 (left) alongside one of the messages you might see if communication fails (right).
- Turn on the rocker switch labeled Motors.
- Make sure your programming cable is connected, the Arlo’s Main power rocker switch is on, and the Activity Board’s power switch is set to 1.
- Verify that the DHB-10’s indicator lights blink on/off orange once every second.
- If not, go back to the Arlo Assembly Tutorial and start checking wiring connections.
- Open and run Test Activity Board and DHB-10 Communication.c.
- If the SimpleIDE Terminal displays an error message, recheck the cables connecting the Activity Board servo ports to the DHB-10’s Ch1 and Ch2 ports.
- If the SimpleIDE Terminal displays the hardware and firmware versions, make a note of the firmware version, and then proceed to the Test Motor Connections section.
/*
Arlo - Test Activity Board and DHB-10 Communication.c
Run this program to verify that your Activity Board and DHB-10 are communicating.
Should display:
Hardware
HWVER = 1
Firmware
VER = 10
If it instead displays:
"ERROR, no reply from DHB..."
It means there is a wiring problem.
*/
#include "simpletools.h" // Include simple tools
#include "arlodrive.h" // Include arlo drive
char *s;
int main() // Main function
{
freqout(4, 2000, 3000); // Beep -> program starting
print("Program running...\n"); // Program running msg
s = dhb10_com("HWVER\r"); // Request hardware version
print("Hardware\n HWVER = %s", s); // Display reply
s = dhb10_com("VER\r"); // Request firmware version
print("Firmware\n VER = %s", s); // Display reply
}