Radio-Receive Tilt
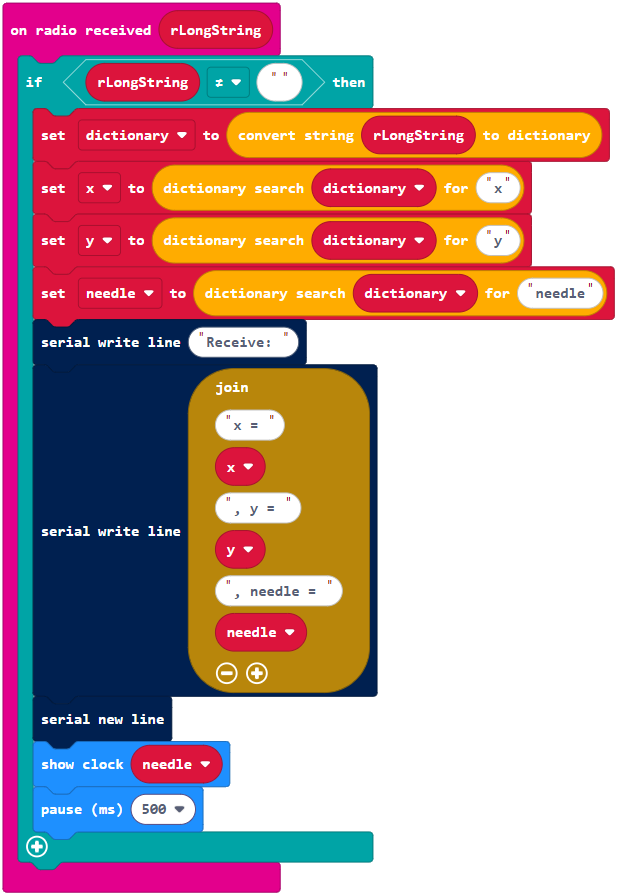
The radio_tilt_receive_test project is a modified version of countdown_receiver from the Cybersecurity: Radio Data’s Send and Receive Packets activity. To receive and display tilt, it is adjusted to parse x, y, and needle values from the packet it receives, and then use statements from display_tilt_down_with_leds to display the tilt with its LEDs and in the terminal.
Example project: radio_tilt_receive_test
For best results:
- Connect your cyber:bot to a second USB port (or to another computer).
- Open a second makecode.microbit.org editor
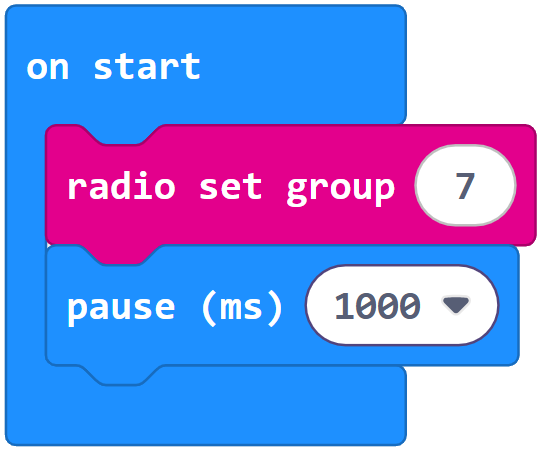
- If you are in a classroom, adjust the radio set group in the project to your assigned channel.
- Enter and flash radio_tilt_receive_test into the cyber:bot that you will use to display the tilt data it’s receiving from the transmitter.
The goal is to be able to tilt the transmitting micro:bit, and verify matching data in the receive terminal, and on the receiver micro:bit’s LEDs. So, you will be tilting the transmitter while monitoring the receiver.
- Open the terminal in the editor that’s connected to the receiving cyber:bot.
- Tilt the transmitter micro:bit in various directions.
- Verify that the micro:bit on the receiving cyber:bot displays the direction you are tilting with its LEDs.
- Verify that it displays the x, y, and needle measurements in the terminal.
