Servo Direction
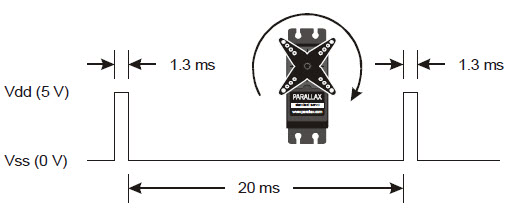
Your cyber:bot servos need to receive a high (5 volt) signal pulse every 20 milliseconds to keep rotating smoothly. The speed and direction of rotation are determined by how long that high pulse lasts. Take a look at the timing diagrams below.
Servo Direction
Full speed clockwise requires 1.3 ms high pulses. To do this, use servo speed (-75).
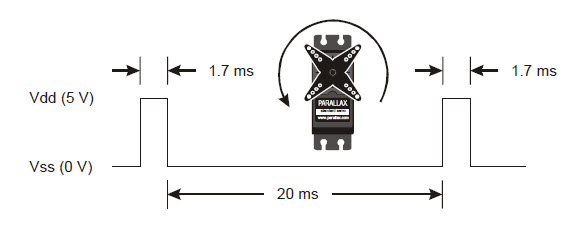
Full speed counter-clockwise requires 1.7 ms high pulses. To do this, use servo speed (75).
Full speed typically falls in the 50 to 60 RPM range.
To center the servos, we used a servo speed (0). This generates high signals that last 1.5 ms — halfway in between — that not only make the servo stay still but also resist being twisted. This is useful for stopping on slopes or pausing in the middle of a series of maneuvers.
To stop sending signals to the servos entirely, use the servo stop block. This will also make the servos stay still, but they will not resist being twisted.
What’s RPM? Revolutions Per Minute—the number of full rotations turned in one minute.
What’s a pulse train? Just as a railroad train is a series of cars, a pulse train is a series of pulses (brief high signals).
Hardware Setup
- Set the cyber:bot board’s power (PWR) switch to Position 0.
- Make sure the battery holder is loaded with 5 AA batteries.
- Make sure the battery holder’s barrel plug is firmly plugged into the cyber:bot board’s barrel jack.
- Connect your micro:bit module to your computer with a USB cable.
Example Project: left_servo_clockwise
- In a Google Chrome or Microsoft Edge browser, go to makecode.microbit.org
- Open a new project and name it left_servo_clockwise.
- Make sure the cyberbot Extension is included in your new project.
(See Add modules to your micro:bit). - Make sure your micro:bit is properly connected and paired.
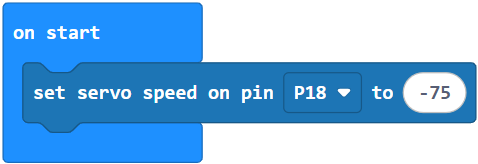
- Enter the blocks and arguments below and click the purple Download button in the bottom left.
- Set the power (PWR) switch to position 2.
- Verify that the left servo (connected to P18) is rotating between 50 and 60 RPM clockwise.
- Set the PWR switch to 0.
Try This: Left Servo Counterclockwise
Now, try turning the left servo in the other direction.
- Change the project name from left_servo_clockwise to left_servo_counterclockwise or make a new one.
- In the servo speed block, change (-75) to (75).
- Flash the project with the Download button.
- Set the PWR switch to 2.
- Verify that the servo connected to pin 18 now rotates in the other direction, which should be counterclockwise, at about 50 to 60 RPM.
- Set the PWR switch to 0.
Your turn: Left Servo Stay Still
Now, try making the left servo stop, two different ways.
- Change the project name from left_servo_clockwise to left_servo_stay_still or make a new one.
- In the servo speed block, change (-75) to (0).
- Flash the project with the Download button.
- Set the PWR switch to 2.
- Verify that the left servo is not rotating in any direction, but gently resists being twisted.
- Change the servo speed (0) block to the servo stop Block.
- Flash the project with the Download button.
- Verify that the left servo neither turns nor resists being turned.
- Set the PWR switch to 0.
Example Project: right_servo_clockwise
- Open a new project and name it right_servo_clockwise.
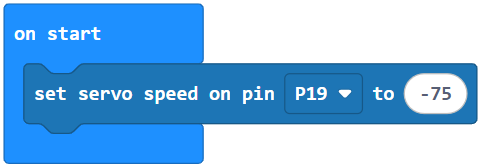
- Enter the Blocks and arguments shown below.
- Flash the project into the micro:bit with the Download button.
- Set PWR to 2.
- Verify that the right servo (connected to P19) is rotating between 50 and 60 RPM clockwise.
- Set PWR to 0.
Try This: Right Servo Counterclockwise
- Change the project name from right_servo_clockwise to right_servo_counterclockwise, or make a new one.
- In servo speed (-75) change (-75) to (75).
- Flash it with the Download button.
- Set PWR to 2.
- Verify that the servo connected to P19 turns full-speed counterclockwise, about 50 to 60 RPM.
- Set PWR to 0.
Your Turn: Right Servo Stay Still
- Change the project name from right_servo_clockwise to right_servo_stay_still, or make a new one.
- In the servo speed block, change (-75) to (0).
- Flash it with the Download button.
- Set PWR to 2.
- Verify that the right servo is not rotating in any direction, but gently resists being twisted.
- Change the servo speed (0) block to the servo stop Block.
- Flash it with the Download button.
- Verify that the right servo neither turns nor resists being turned.
- Set PWR to 0.