Chapter 6 Challenges
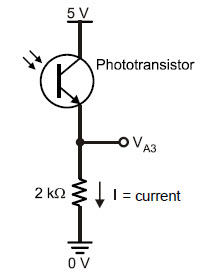
Phototransistor Voltage Output Circuit
Questions
- What does a transistor regulate?
- Which phototransistor terminals have leads?
- How can you use the flat spot on the phototransistor’s plastic case to identify its terminals?
- Which color would the phototransistor be more sensitive to: red or green?
- How does VA3 in the circuit above respond if the light gets brighter?
- What does the phototransistor in the circuit above do that causes VA3 to increase or decrease?
- How can the circuit above be modified to make it more sensitive to light?
- What happens when the voltage applied to an I/O pin that has been set to input is above or below the threshold voltage?
- If the amount of charge a capacitor stores decreases, what happens to the voltage at its terminals?
Exercises
- Solve for VA3 if I = 1 mA in the circuit above.
- Calculate the current through the resistor if VA3 in the circuit above is 4.5 V.
- Calculate the value of a capacitor that has been stamped 105.
- Write an rcTime statement that measures decay time with pin 7 and stores the result in a variable named tDecay.
- Calculate what the ndShade measurement would be if the Arduino measures decay values of 1001 on both sides.
- Write a for loop that displays fifty equal sign characters in the Serial Monitor.
Projects
- In Activity 1, the circuit, along with the HaltUnderBrightLight sketch, made the BOE Shield-Bot stop under a light at the end of the course. What if you will only have a limited time at a course before a competition, and you don’t know the lighting conditions in advance? You might need to calibrate your BOE Shield-Bot on site. A sketch that makes the piezospeaker beep repeatedly when the BOE Shield-Bot detects bright light and stay quiet when it detects ambient light could be useful for this task. Write and test a sketch to do this with the circuit in Activity 1.
- Develop an application that makes the BOE Shield-Bot roam and search for darkness instead of light. This application should utilize the charge transfer circuits from Building the Photosensitive Eyes.
- Develop an application that makes the BOE Shield-Bot roam toward a bright incandescent desk lamp in a room where the only other light sources are fluorescent ceiling lights. The BOE Shield-Bot should be able to roam toward the desk lamp and play a tone when it’s under it. This application should use the charge transfer circuits from Building the Photosensitive Eyes.