Go and Get an Object with Distance Control
]
It might seem like you can control the robot’s distance by setting a drive speed for a certain amount of time, but there are periods of time when the cyber:bot has to speed up and slow down. So, some trial and error is required if you’re navigating with speed control. With distance control, the cyber:bot calculates acceleration, cruising speed, and deceleration times before executing the maneuver. It also makes some fine adjustments at the end of each distance maneuver.
In this activity, you will use cyber:bot distance navigation techniques to make the cyber:bot robot roll to, pick up, move, and set down an object. The maneuvers will be very similar to the speed control examples from the previous activity. The main difference will be that you can measure a distance and then update the script to make the cyber:bot travel that distance.
Parts
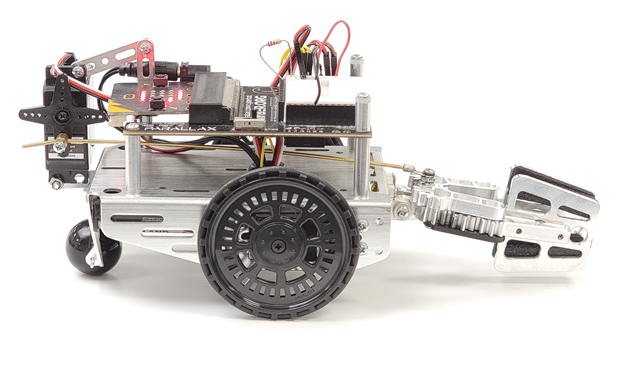
(1) cyber:bot with Gripper installed, tested and tuned by following the Parts, Circuit, Script and Tests sections in the previous Test and Tune the Gripper activity.