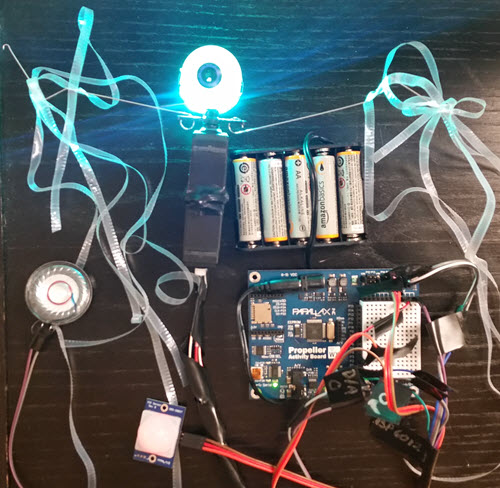
There is no need to build circuits on the breadboard for this project. Instead, it takes advantage of the Activity Board WX's 3-pin headers for the servos, and its D/A socket to drive the magnetic speaker.
Propeller I/O pin connections
- Neopixel ring Data out - P0
- Neopixel ring Data input - P1
- Speaker - D/A 0 (P26)
- PIR Rev B - P3
- Hip servo - P15
- Shoulder servo - P17
- With power to the board turned OFF, make sure your servo port power jumpers are set to 5 V.
- Plug the hip servo cable into the P15 servo header, and the shoulder servo cable into the P17 servo header.
- Connect one speaker lead to the D/A 0 socket, the other to GND - there's no + or - pins, either will do.
- Connect the PIR sensor to to P3, 5V, and GND.
- Connect the Neopixel ring Data out to P0, Data input to P1, 5 VDC to 5V, and GND to GND.
Which wire is which? Before you wrap your jumper wires together with electrical tape, get your code built and tested, and then label each wire. This is especially handy if you plugged two wires together of different colors to make a longer lead.