Step 1 – Prepare your Encoders
Have Feedback 360° Servos? If yes, skip this step.
Go to Step 2 – Prepare the Tires.
Prepare the External Encoders
These parts are bagged together as the ActivityBot Encoder Kit. Save the resistors, you will need them later for Electrical Connections.
Parts needed for this step:
- (2) Sharp infrared sensor (#350-00038)
- (2) Cable for encoders (#805-28107)
- (2) Encoder bracket (#721-00031)
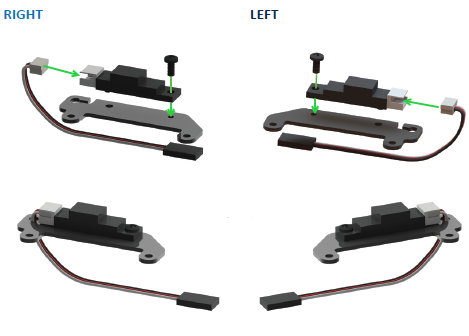
Asemble the right and left encoders to be mirror images of each other.
- Place an encoder sensor on each encoder plate, with the cable socket facing the hook end.
- Secure each sensor to its plate with a black 1/4″ screw. It will not need a nut to secure it – the plastic plate will hold it in place.
- Push the white plug end of an encoder cable into each sensor’s socket. It should only insert one way; make sure it seats all the way in.