Check your Hardware
- Check your kit’s contents to make sure it is complete. If anything is missing, parts can be obtained directly from Parallax: email sales@parallax.com or call 888-512-1024.
Which Servos/encoders do I have?
This tutorial supports the original ActivityBot Robot Kit (#32500) and the ActivityBot 360° Robot Kit (#32600). What’s the difference?
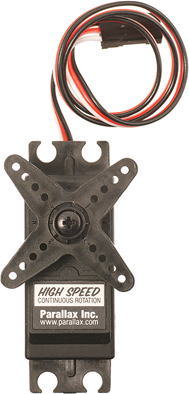
Original ActivityBot Robot Kit (#32500)
This kit has HIgh Speed Continous Rotation Servos + External Encoders. The servo has a white-red-black 3-wire cable.
Look for instructions mentioning “external encoders.”

ActivityBot 360° Robot Kit (#32600)
This kit as Parallax Feedback 360° High Speed Servos. This servo has a white-red-black 3-wire cable, and a separate yellow wire for sending feedback signals. It does not use external encoders, as these servos have encoder sensors built right inside the case.
Look for instructions mentioning “Feedback 360° servos.”


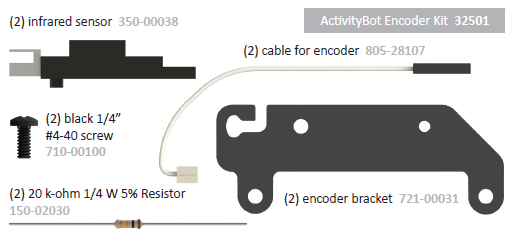
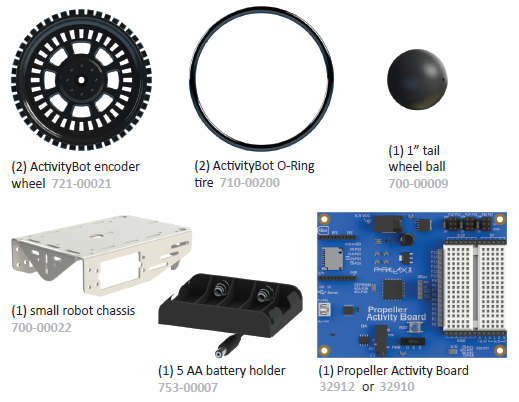
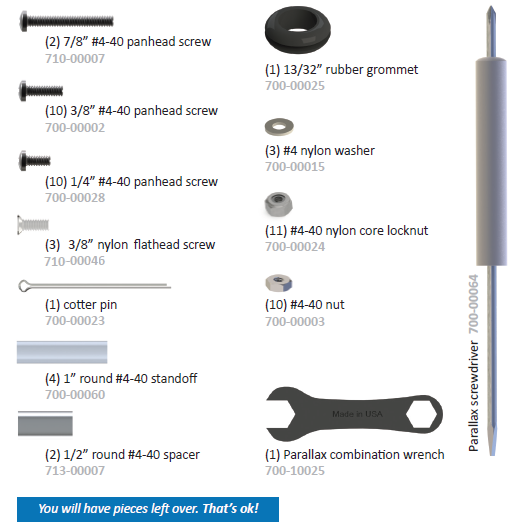
Other Hardware
You will use these pieces during the hardware assembly.
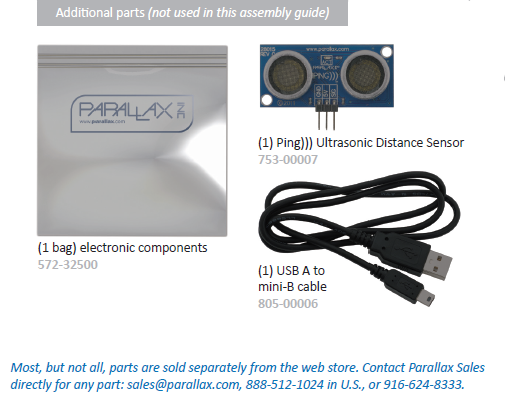
Save for Later
These pieces won’t be needed for the hardware assembly, so you can set them aside and save them for later activities.