Blinks
Next, let’s test-drive two built-in light circuits on your Activity Board.
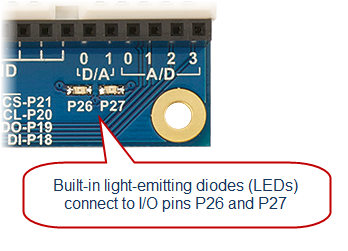
Your Activity Board (original and WX version) has two built-in lights, near the bottom-right corner of the board. These tiny light-emitting diodes (LEDs) are already electrically connected to I/O pins P26 and P27. These LEDs are helpful when developing applications that use sensors. The idea is to write your program so that if a sensor is activated, an LED lights up to give you, the roboticist, a quick visual cue that the sensor is actually detecting something.
The Simple Circuits tutorial has an example program for blinking these LEDs.
- Go try the Blink a Light tutorial, then come back here when you are done.
Welcome back!
- Follow the links below to continue with the ActivityBot tutorials.