Circuit Practice
It’s tempting to dive right into robot navigation. We understand! But, as with any vehicle, it’s wise to get familiar with the controls before attempting to drive.
In this section you will:
- Take a look at your Propeller Activity Board’s features
- Take a closer look at the power switch and breadboard
- Try blinking the built-in light-emitting diodes
- Add a piezo speaker to your board and make it beep
Know your Board
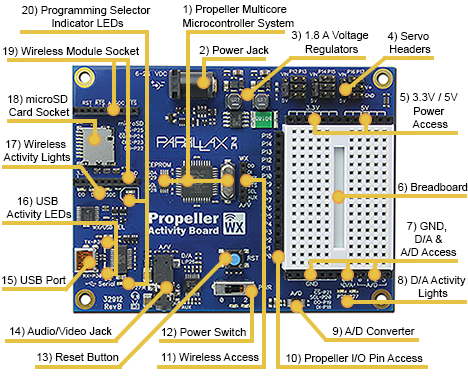
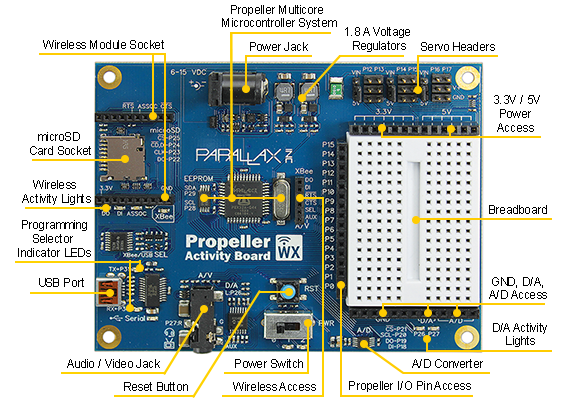
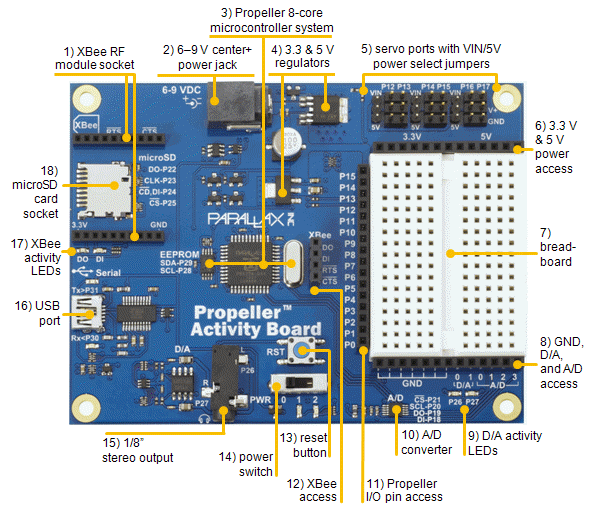
Take a quick tour of the Propeller Activity Board (original or WX version) to get acquainted (or re-acquainted) with its feautres. You’ve already connected cables to the servo ports and have plugged the battery pack into the power jack. You’ve been programming it a bit already, so you have been using the USB port.
- Check the label on your board, and read more about its features below.
Propeller Activity Board WX (#32912)
Rev B/C
Propeller Activity Board WX (Rev A, #32912)
Propeller Activity Board (Original, #32910)
Next, let’s take a closer look at two features in particular: the power switch and the breadboard. These features are found on both versions of the Activity Board.
- Follow the links below to continue with the ActivityBot tutorial.