Step 12 – Mount the Activity Board
Mounting the Propeller Activity Board WX
For all ActivityBot robot kits.
Parts for this step:
- Propeller Activity Board WX (#32912) or original (#32910)
- (2) 1/4-inch pan-head screws (##700-00028)
- (2) 7/8-inch pan-head screws (#710-00007)
- (2) white Nylon washers (#700-00015)
- (2) 1/2-inch round alumninum spacers (#713-00007)
- Rest the Propeller Activity Board over the robot chassis on top of the four standoffs, aligning its corner mounting holes with the standoffs.
- The white breadboard should be near the front of the ActivityBot, NOT over the tail wheel ball at the rear.
- Put a 1/4-inch screw through the each of the board’s rear mounting holes, and secure to the rear standoffs.
- Slip a white Nylon washer over two of the 7/8-inch screws.
- Slip a 1/2-inch metal spacer over each of those same 7/8-inch screws.
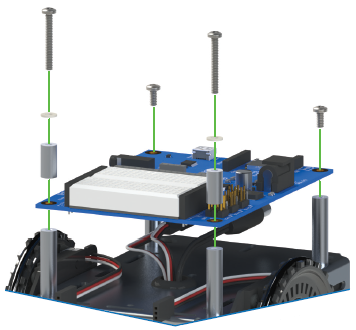
- Secure the Activity Boards’ two front mounting holes to the front standoffs with those same 7/8-inch screws.