Mount the Battery Pack
Parts List
(2) Nylon flat-head slotted screws, 3/8″ 4-40
(2) 1″ standoffs (removed from BOE Shield previously)
(1) 5-cell battery pack with 2.1 mm center-positive plug

Instructions
- Place the empty battery pack inside the chassis positioned as shown. The easiest method is to insert one side, then press down on the other side until it is flush with the chassis. The fit may be snug, but it should snap into place using a small amount of force (below).

- Insert the two Nylon flat-head screws through the inside of the battery pack. Use the smaller set of holes that line up with the chassis mounting holes for the front standoffs, shown by the arrows.
- From the top of the chassis, thread a 1″ standoff on each screw and tighten.
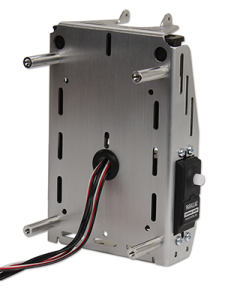
- Pull the battery pack’s power cord and servo lines through the rubber grommet hole in the center of the chassis, as shown below.