How The Test Project Works
How cyber_bot_gripper_forward_object Works
After importing the cyberbot module, the project begins to constantly monitor the tilt micro:bit module’s B button.
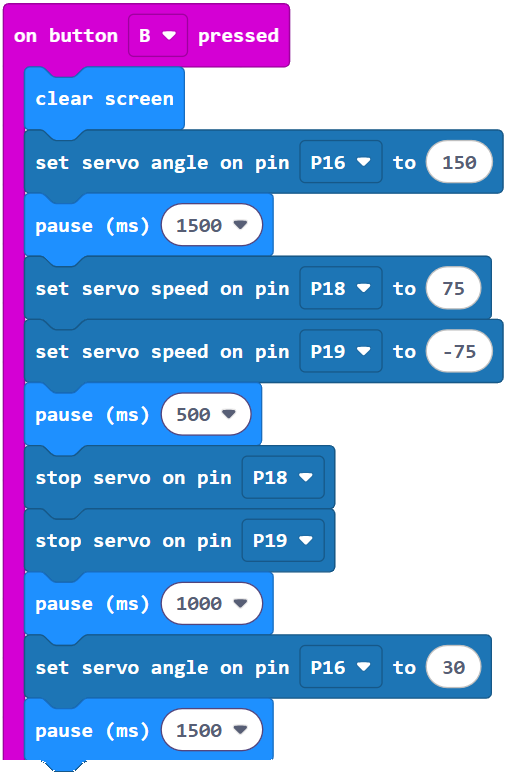
If the B button was pressed, the cyber:bot starts by rolling forward for ½ a second, then stops. The routine is appended with a pause (1000) block to make sure the cyber:bot has completely come to rest. Once at full stop, the project uses (Pin16) servo angle (30) to close the Gripper. It is followed by pause (1500) to give the Gripper paddles time to close and lift, and partially to make a slight pause between picking up the object and starting to move.
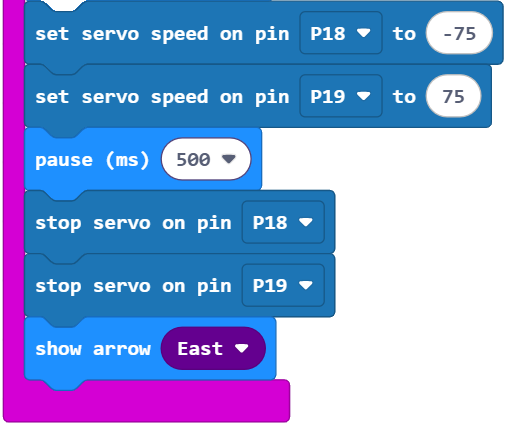
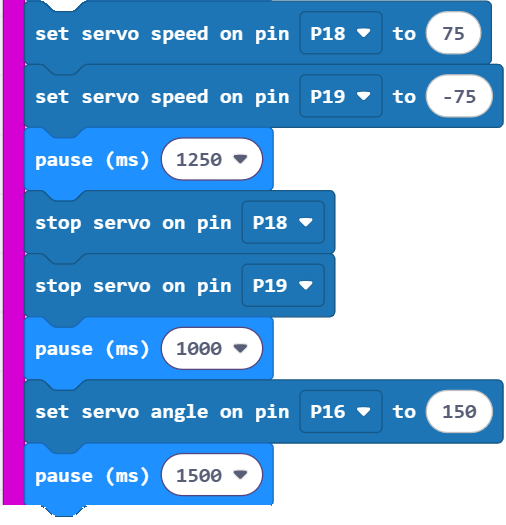
After lifting the object, this part of the project makes the cyber:bot roll forward for 1.25 s. Then, it lowers and opens the Gripper paddles, setting down the object.
Finally, it backs up for 0.5 s so that the object is no longer between the Gripper paddles.