Project for Tilt & Grip cyber:bot
Project: radio_tilt_grip_controlled_cyberbot
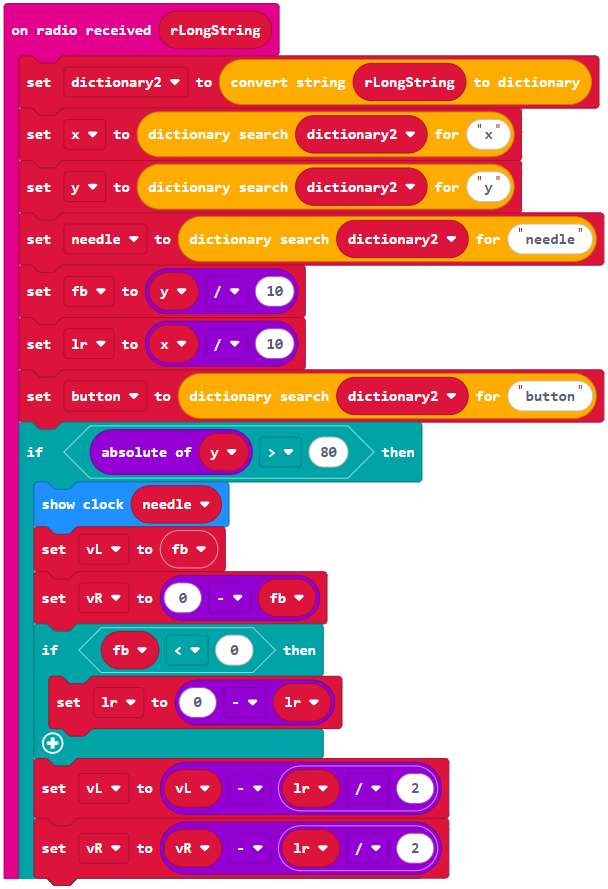
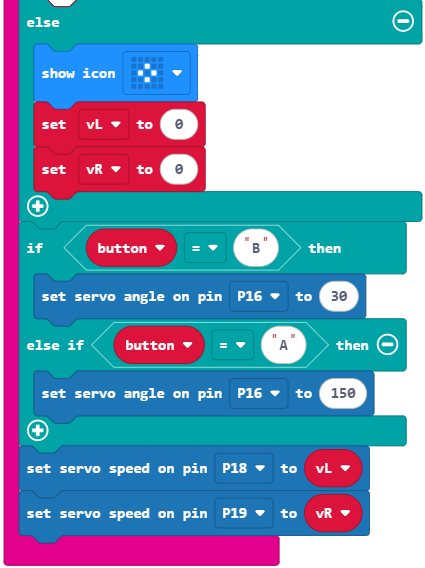
This is the project to run on the cyber:bot robot. It receives values from the micro:bit tilt controller that are used for its drive servos and Gripper servo.
- Right-click the cyber_bot_gripper_forward_object.hex link below, choose Save As, and then save the file to your computer.
radio_tilt_grip_controlled_cyberbot.hex
- Open the saved file with the micro:bit Makecode Editor editor.
- If you are working with more than one of these robots in a classroom, update channel=7 to your assigned channel.
- Plug the battery pack’s barrel plug into the cyber:bot board’s barrel jack.
- Set the cyber:bot board’s PWR switch to 0.
- Click Download.
- Disconnect the USB from the cyber:bot robot’s micro:bit module.
- Set the cyber:bot on the floor, and then set the cyber:bot board’s PWR switch to 2.