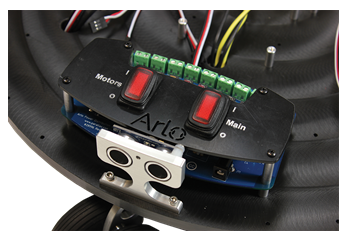
Step 32 – Arlo Power Distribution Board
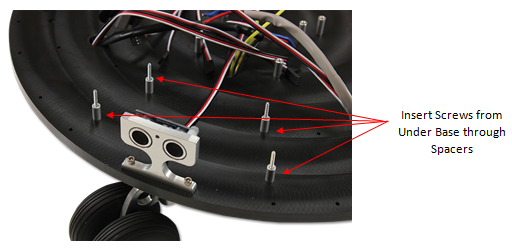
- Use the (4) #4-40 x 1.5” long machine screws and the (4) ½” long x ¼” diameter aluminum un-threaded spacers (mounted under the PCB), and screw them up from underneath and through the spacers (which lift the PCB ½” up off the Arlo deck), into the 1.5” long threaded standoffs.
Note: This below image is a guide to show placement of the 4 screws and standoffs. As you install the Power Distribution Board you will have to install each screw/standoff to the PDB one at a time.
- These screws, once inserted into the standoffs of the Power Distribution Board, secure the PDB to the rear of the Arlo main deck as shown.