Step 9 – Wheel Assemblies to Drive Shaft
- Next, mount the wheel assemblies to the drive shafts, being careful to align the drive pin to the slots cut into the rim assemblies. Attach each wheel with (1) #¼-20 x 5/8” button head screw on each assembly.
- If the motor wires have a band of electrical tape that is strapping the wires to the motor housing (acting like a strain-relief), remove the tape and use a couple of Zip Ties from the Arlo Hardware pack to hold the wire assemblies together (as shown below). This will allow the wires to go through the appropriate holes more easily.
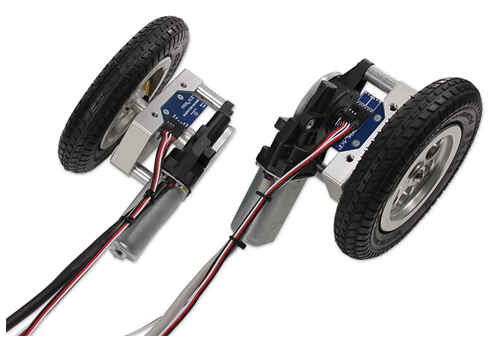
You should now have two drive assemblies that are mirror images of each other:
This completes the assembly of the Motor Mount and Wheel Kit. Set the finished drive units aside for now and go on to Section 2.