This section shows you how to make your ActivityBot move. It covers:
- Calibrating your servo/encoder system
- Testing and tuning the system for optimal performance
- How to drive a specific distance
- How to drive a specific speed.
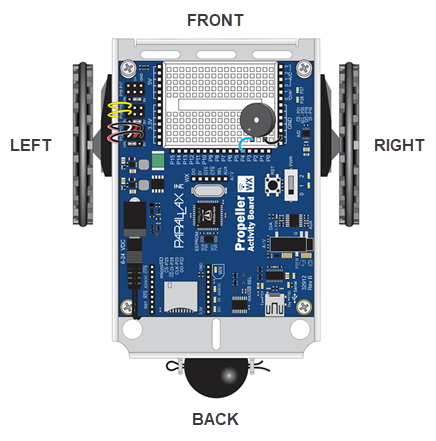
Get Oriented
From here forward, we will be talking about the robot's right and left sides, and its front and back. These terms are from the perspective of a tiny person sitting on the white breadboard, with a hand on each post and feet dangling past the edge of the board.
Now you are ready to roll!
Before You Start:
- Last chance! Make sure you have the latest SimpleIDE software and Learn folder.