Step 26: Configure Motor Spin Direction
Now you will check that the motors are spinning in the desired direction. If any motors are spinning in the wrong direction, it is a simple matter of switching any two of the ESC outputs to fix the issue.
Parts Needed:
- ELEV-8 v3 Assembly w/ LiPo Battery
- Computer with software & firmware installed from Step 22
- USB A to Micro B cable
Instructions:
Warning! Propellers should not yet be installed on your ELEV-8 v3. If you have done so, remove them now before continuing.
- Connect your ELEV-8 Flight Controller to your computer’s USB port with a USB A to Micro B cable.
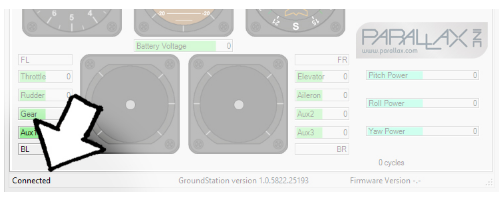
- Open the ELEV-8 GroundStation software. The Status tab will be displayed first. Use the information displayed in the bottom-left corner to verify that the ELEV-8 v3 is properly connected. It will display “Connected” if it is
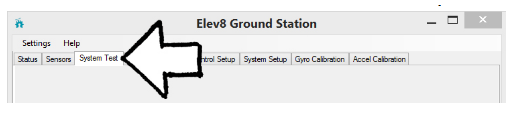
- Once the ELEV-8 v3 is connected to the GroundStation software, click on the System Test tab.
- Make sure the propellers are not mounted on the motors, and then use the buttons with circular arrows to verify that each motor spins in the correct direction. Click the “Buzzer” and “LED” buttons to make sure both the buzzer and LED are responding correctly as well. The buzzer will do a two-tone beep and the LED will cycle through a rainbow of colors.

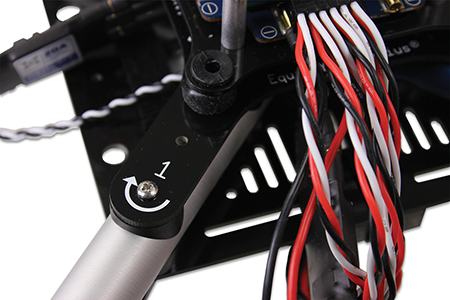
If the motor spun in the correct direction (as indicated by the markings on your top chassis plate, shown below), skip to step 8. If it did not, follow steps 5-7.
If the Motor Did Not Spin in the Correct Direction:
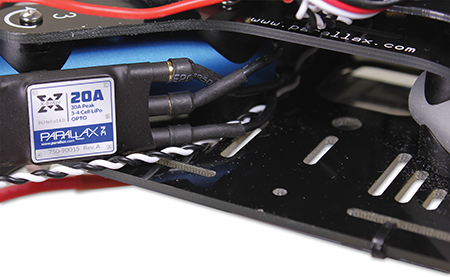
- Turn the ELEV-8 over and locate the ESC corresponding to (matching the number of) the motor in question.
- Locate any two of the (three) blue extension wires running to the ESC and unplug them from the ESC.
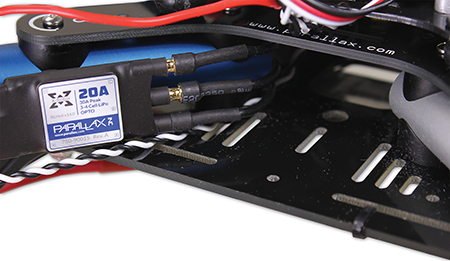
- Switch the extension wires for one another, and plug them back in. You have now reversed (corrected) the motor’s spin direction.
- Repeat instructions 1-8 as necessary for the three remaining motors/ESCs.