Step 27: Mount ESCs to Booms
With the motors all spinning the correct directions, you can now secure the ESCs so that they don’t move during flight. By securing them to the booms, they won’t get in the way of folding up your ELEV-8 for transport if you ever choose to do so.
Tools Needed:
{kind=link}
{kind=link}
Parts Needed:
- ELEV-8 v3 Assembly
- (8) – Zip Tie, 5.9″ length (#700-00099)
Instructions:
- Feed a zip tie around the #3 boom.
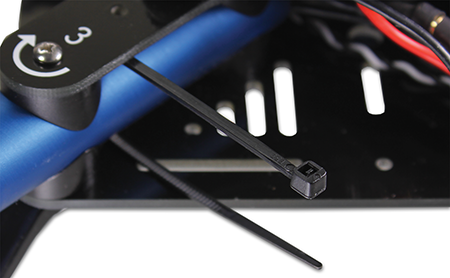
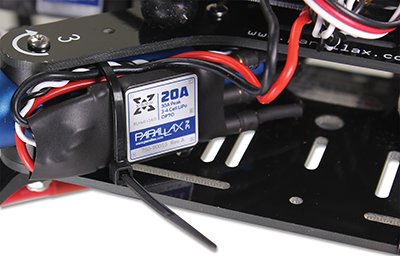
- Take the ESC connected to the wires coming out of that boom and place it up against to boom, with the wires above it, inside of the zip tie. Fasten the zip tie loosely around the ESC and wires as shown below.
- Feed another zip tie around the boom and fasten as shown in the picture below.
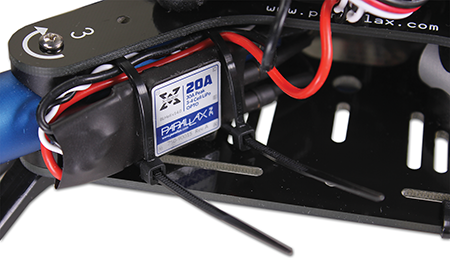
- Tighten both zip ties and trim the tails.

- Repeat for the other 3 ESCs.