Sense Light
When a street light turns itself on at at dusk, or a camera knows when to use auto-flash, a light-sensing phototransistor may be at work. Let’s try using a phototransistor with the Propeller microcontroller for measuring light levels.
When a street light turns itself on at at dusk, or a camera knows when to use auto-flash, a light-sensing phototransistor may be at work. Let’s try using a phototransistor with the Propeller microcontroller for measuring light levels.
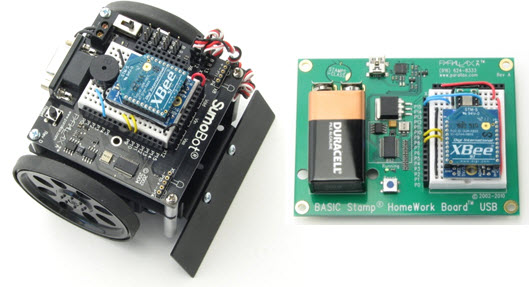 Pairing a Memsic 2-axis accelerometer with XBee RF modules makes a powerful and fun wireless tilt controller for your robot. One XBee module and a Memsic Dual-Axis Accelerometer are mouted on a BASIC Stamp HomeWork Board. The other XBee module mounts on a BASIC Stamp controlled robot. SumoBot wrestling is a perfect application for this!
Pairing a Memsic 2-axis accelerometer with XBee RF modules makes a powerful and fun wireless tilt controller for your robot. One XBee module and a Memsic Dual-Axis Accelerometer are mouted on a BASIC Stamp HomeWork Board. The other XBee module mounts on a BASIC Stamp controlled robot. SumoBot wrestling is a perfect application for this!
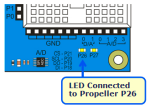 Learn how to control your Propeller Activity Board or FLiP's built-in LED lights and play around with blink rates in this Propeller C - Simple Circuits tutorial.
Learn how to control your Propeller Activity Board or FLiP's built-in LED lights and play around with blink rates in this Propeller C - Simple Circuits tutorial.
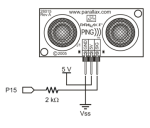 Visit this simple Propeller C - Simple Devices tutorial to learn how to set up and use the PING))) Ultrasonic Distance Sensor to measure distances to objects, and control LED lights on your Propeller board.
Visit this simple Propeller C - Simple Devices tutorial to learn how to set up and use the PING))) Ultrasonic Distance Sensor to measure distances to objects, and control LED lights on your Propeller board.
A 7-segment display is a great way to display numbers using your Propeller. You can find these in many products that need to display numbers in a simple way, like clocks, kitchen appliances, or digital scales. This display uses seven LEDs arranged in a special pattern that makes it possible to show any number from 0 to 9. This tutorial will show you exactly how to control the display, and use it to count.
There are three main "environments" within your Robotics Laboratory. Each of these must be kept organized - otherwise you’ll have chaos. Chaos and robots do not go well together.
Building robots usually entails working with a wide variety of tools and components. Many problems can be avoided by simply keeping your work area clean and orderly. Among the items that you may be working with are:
 Pairing a Memsic 2-axis accelerometer with XBee RF modules makes a powerful and fun wireless tilt controller for your robot. One XBee module and a Memsic Dual-Axis Accelerometer are mouted on a BASIC Stamp HomeWork Board. The other XBee module mounts on a BASIC Stamp controlled robot. SumoBot wrestling is a perfect application for this!
Pairing a Memsic 2-axis accelerometer with XBee RF modules makes a powerful and fun wireless tilt controller for your robot. One XBee module and a Memsic Dual-Axis Accelerometer are mouted on a BASIC Stamp HomeWork Board. The other XBee module mounts on a BASIC Stamp controlled robot. SumoBot wrestling is a perfect application for this!
Light sensing has many uses. Think of a street light turning on at dusk, or a camera knowing when to use auto-flash. Phototransistors are a common type of light sensor used in these kinds of applications. Let’s try one with the Propeller for measuring light levels.
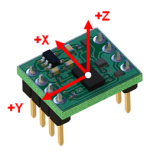 Need to measure acceleration in 3 axes? This tutorial will show you how to use an MMA7455 3-Axis Accelerometer with your Propeller board.
Need to measure acceleration in 3 axes? This tutorial will show you how to use an MMA7455 3-Axis Accelerometer with your Propeller board.