Put the safety glasses on immediately! The Gripper has small parts, including a torsion spring which may be inadvertently released during assembly.
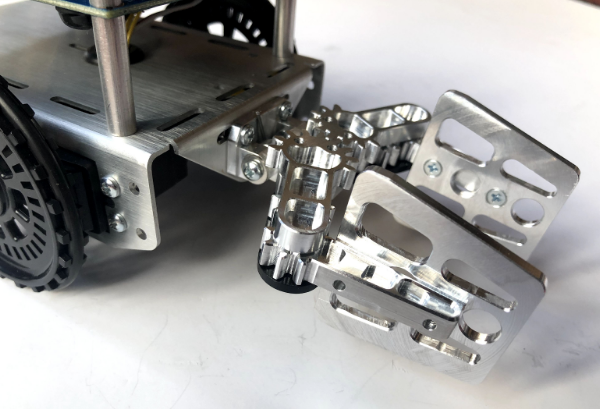
- Turn your robot over so it is right-side up and take a look at your work! The torsion spring will hold the Gripper close to the surface. It should open and close smoothly.
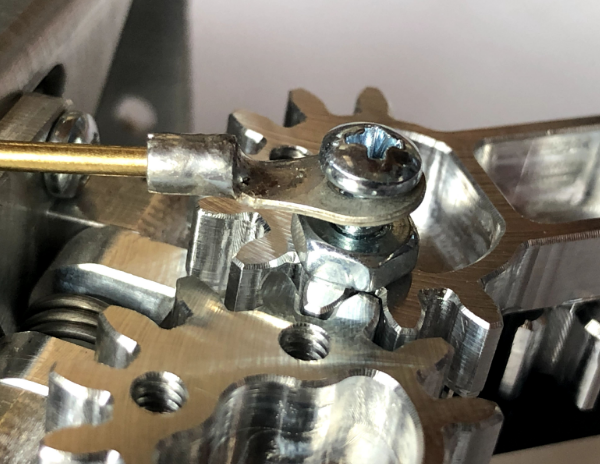
- Using a 4-40 ⅜” panhead screw and a 4-40 machine nut, attach the brass rod with a ring terminal connector to the Gripper’s front left side on the innermost threaded hole of the Arm.
- Tighten the nut against the Arm. Be sure to locate the brass rod’s ring terminal so that it’s rotated in the low position as shown.