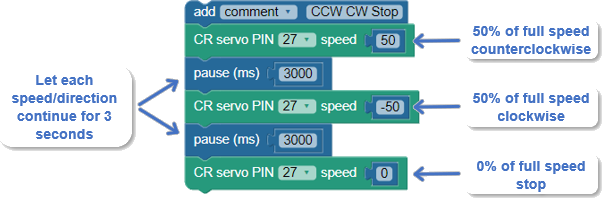
The Propeller FLiP executes blocks starting at the top and works its way downward. So, the first block it executes is CR servo PIN 27 speed 50, which makes the servo turn at about half speed counterclockwise.
The pause (ms) 3000 makes the Propeller FLiP do nothing for 3 seconds. During that time, the wheel continues to turn.
Next, CR servo PIN 27 speed -50 makes the servo turn at half speed clockwise, and the pause (ms) 3000 block below it allows it to continue turning for another 3 seconds.
Last but not least, CR servo PIN 27 speed 0 makes the servo turn at 0 speed, and since there’s nothing after it, it continues to hold that (zero) speed indefinitely.
When the Propeller executes code from a CR servo PIN….speed… block, another one of the Propeller microcontroller’s 8 cores steps in and starts sending repeated signals to make a continuous rotation servo turn at a certain speed. It will keep sending those signals and the servo will keep turning until another CR servo PIN...speed… block asks for a different speed. At that point, the Propeller core that is sending the servo control signals updates them for the new behavior.
This “set it and forget it” response to CR servo PIN...speed… blocks is very useful. Your program can do other things while the servos are turning, like check sensors, calculate, decide, and more. Instead of doing that here, the program uses pause (ms) 3000 blocks to just do nothing for 3 seconds. Those pause (ms) blocks allow you to see the servos turn one direction, and then the other before stopping. Without the pause (ms) blocks, all you’d see would be a twitch, and the program would be over in the blink of an eye.