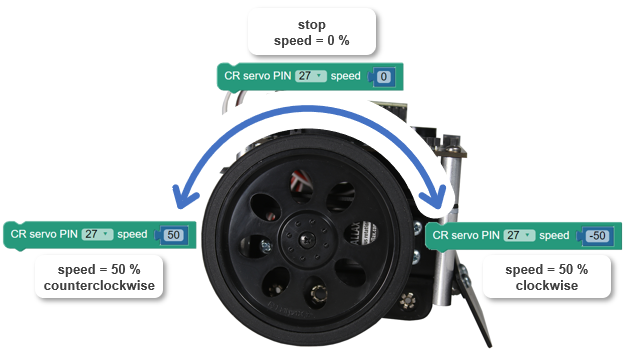
Now that the servos are centered, the CR servo PIN speed blocks can set rotation speeds and directions. This test will make the right servo turn at half speed counterclockwise, then half speed clockwise, then stop.
After testing the right servo that’s connected to P27, you will change all the PIN values from 27 to 26 to test the left servo. You can also try increasing and decreasing the +/- 50 speed values to increase or decrease the wheel speeds.
Parts
- SumoBot, built up at least through the end of the Build your SumoBot WX pages
- USB A to micro-B cable
- Parallax Screwdriver
- 4 AA batteries (in the SumoBot Robot’s battery pack)
Prep
- 4 AA batteries in the battery pack.
- 3-position POWER switch set to 1. (You will set it to 2 after loading the program.)
- BATT LOW light off. If it’s on, that means it’s time for fresh batteries!
- SumoBot connected to your computer’s USB port.
- BlocklyProp Launcher running, and BlocklyProp Solo launched.
- Ports dropdown set to your SumoBot’s port number like you did in Connect, Power & Run.