Attach the Board
This step adds hardware to secure the SumoBot WX board to the chassis now, and also to hold QTI line sensors in the future.
Parts Required for each robot
- SumoBot WX PCB with FLiP module (not shown)
- SumoBot chassis, partly assembled (not shown)
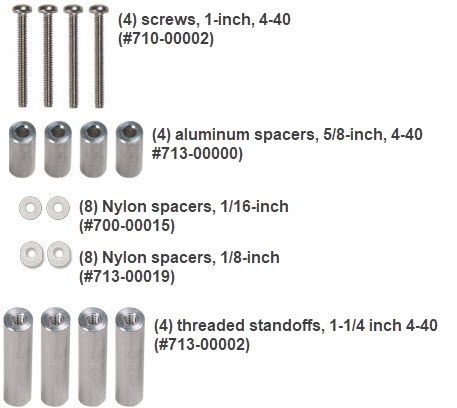
- (4) Screws, 1-inch, 4-40
- (4) Aluminum spacers, 5/8 inch
- (2) 1/16″ Nylon spacers
- (2) 1/8″ Nylon spacers
- (4) 1 1/4-inch threaded standoffs
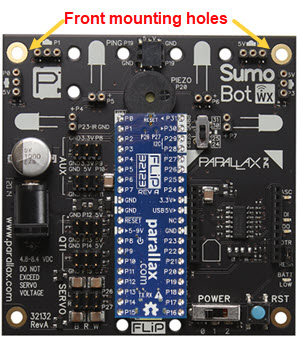
- Locate the SumoBot WX board’s front mounting holes.
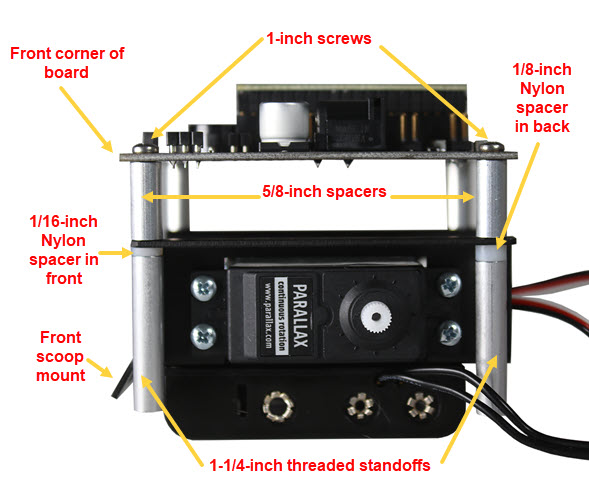
- Thread a 1-inch screw through each of the SumoBot WX board’s front corners, from the top side.
- Slide a 5/8″ aluminum spacer over each screw.
- Position the PCB over the chassis so that the front corners are over the front scoop mount, and the FLiP module is towards the back.
- Thread the screws through the front mounting holes in the chassis.
- Slide a 1/16″ nylon washer over each screw.
- Tighten a 1 1/4″ threaded aluminum standoff onto each screw.
- Repeat for the rear mounting holes, but using a 1/8″ Nylon spacer.