Install the Batteries
High-capacity Tenergy 1.2 V AA NiMH batteries are strongly recommended for the SumoBot WX robots. These rechargeable batteries give a very long run time, up to 120 minutes. Regular 1.5V alkaline batteries may also be used, but the run time is much shorter, about 30 minutes.
Parts required for each robot
- Fully assembled SumoBot WX
- (4) AA batteries (do not mix different types):
- 1.2V NiMH recommended, Tenergy brand gives a long run time ~ 120 minutes
— or — - 1.5V Alkaline, not preferred, gives a short run time ~ 30 minutes
- 1.2V NiMH recommended, Tenergy brand gives a long run time ~ 120 minutes
Install the batteries
- Make sure the 3-position switch is set to 0.
- Load the batteries into the battery holder as shown here.

Test the Power
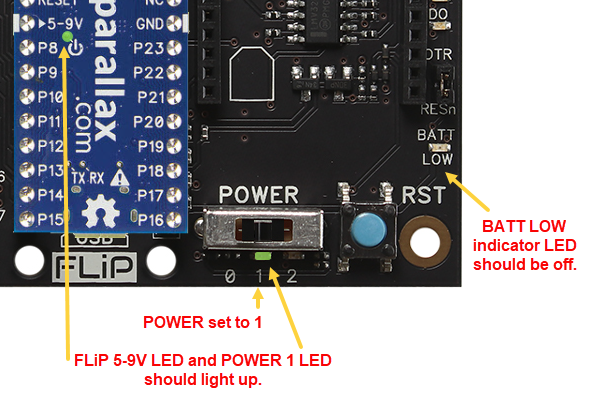
- Set the 3-position switch to 1, and verify that the light above the switch’s 1 label turns on.
- If it does not turn on or is really dim, immediately set the switch back to 0 and remove the batteries. Make sure your FLiP module and servo connections are correct, and that your batteries are installed the right way.
- The red BATT LOW light might flicker for an instant as you slide the switch to different positions. That’s normal, so long as it stays off the rest of the time. If it says on or flashes, it’s probably trying to tell you that your batteries are low.
- Verify that the green light in the FLiP betlow the 5-9V label also turned on.
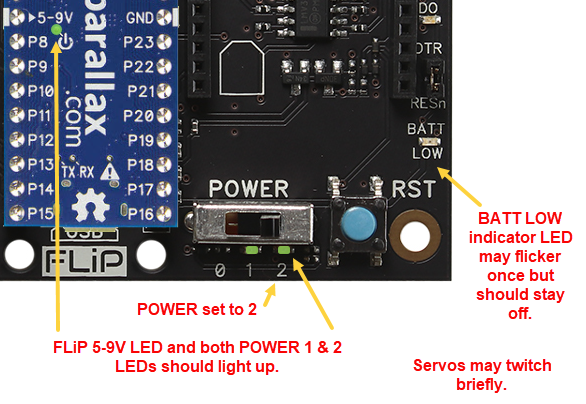
- Set the 3-position switch to 2, and verify that the servos twitch when you did so.
- Verify that both LEDs below the power switch are on now.
- Verify that the green light in the FLiP betlow the 5-9V label is still on.
- Set the 3-position switch to 0, and verify that the lights all turn off.
- Congratulations! You are now ready to continue to the next chapter where you will adjust the servos and write a simple navigation program with BlocklyProp.