Activity 1: Board of Education Shield Setup
The Board of Education Shield makes it easy to build circuits and connect servos to the Arduino module. In this chapter, you will use it to test servos and indicator lights. Next chapter, you’ll mount the BOE Shield and servos on a robot chassis to build a robot we’ll call the BOE Shield-Bot.
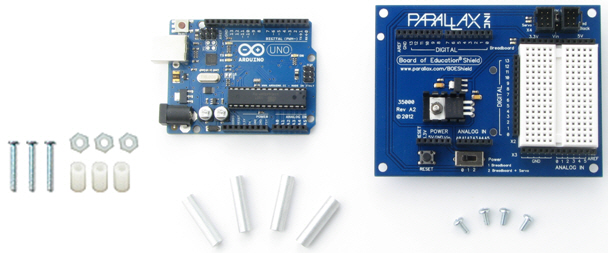
Parts List:
(1) Arduino module
(1) Board of Education Shield
(4) 1″ round aluminum standoffs
(4) pan head screws, 1/4″ 4-40
(3) 1/2″ round nylon spacers*
(3) nylon nuts, 4-40*
(3) pan head screws, 7/8″, 4-40*
(*Items also included in the Boe-Bot to Shield-Bot Retrofit Kit)
Instructions:
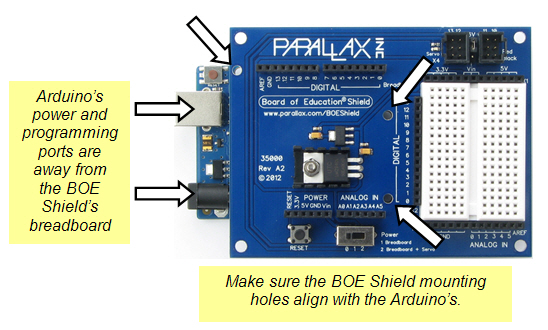
The four groups of pins under the Board of Education Shield plug into the four Arduino socket headers. There are also three board-connection holes in the shield that line up with holes in the Arduino module, designed to connect the two boards together with screws and nylon spacers.
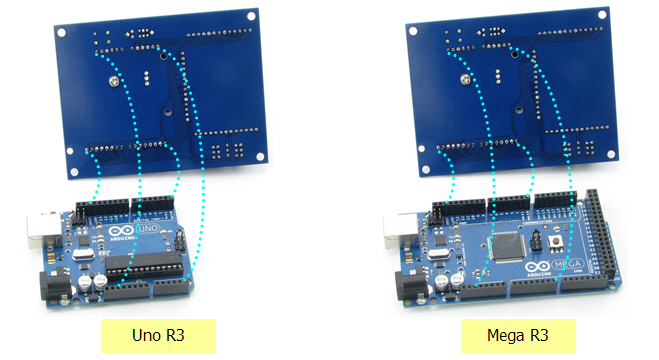
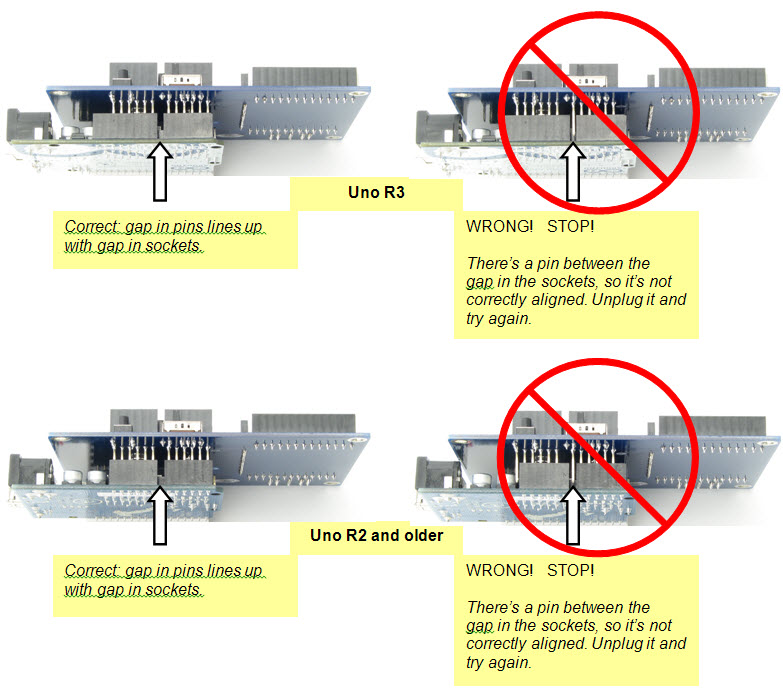
If you have a revision 3 Arduino, it will be labeled UNO R3 or MEGA R3 on the back. R3 boards will have two empty pairs of sockets, closest to the USB and power connectors, after socketing the shield. Earlier versions, such as 2, 1, and Duemilanove, have the same number of sockets as the shield has pins, so there will be no empty sockets left over. If you have an Arduino Mega, the four pin groups will fit into the four headers closest to the USB and power connectors, as shown in the box below.
- Disconnect the programming cable from your Arduino module.
- Look closely at your Arduino module and the pins on the Board of Education Shield to see how the sockets and pins will line up for your particular boards. Note that If you have an Arduino Mega, its USB port and power jack will be close to the edge of the shield, like the image on the right.
Component placement varies a little bit for the different Arduino models; some can only fit one or two nylon standoffs for holding the boards together. This is okay, but you need to find out which holes you can use before socketing the Board of Education Shield.
- Hold a nylon spacer over each mounting hole on your Arduino module, and look through it to see if the spacer can line up with the hole completely.
- For each hole that works on your Arduino module, insert a 7/8″ screw through the corresponding board-connection hole in your Board of Education Shield.
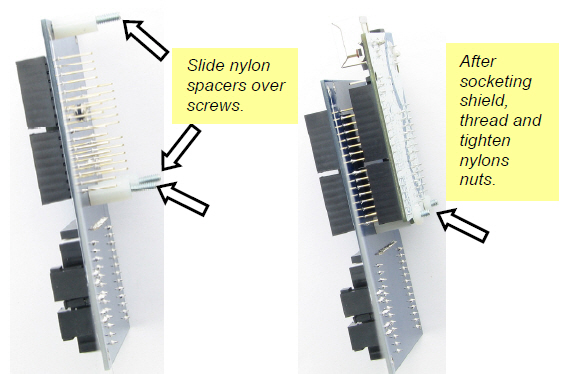
- Slide a nylon spacer over each screw you used.
- Line up the Arduino module’s sockets with the Board of Education Shield’s pins.
- Also line up the 7/8″ screws with the mounting holes in the Arduino board.
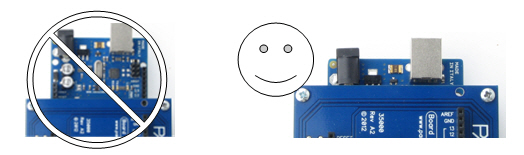
- Gently press the two boards together until the pins are firmly seated in their sockets. The sockets will not cover the pins completely; there will be about 3/8″ (~5 mm) of the pins still exposed between the bottom of the shield and the top of the sockets.
- Check to make ABSOLUTELY SURE your pins are seated in the sockets correctly. It is possible to misalign the pins, which can damage your board when it is powered.
- Thread a nylon nut over each screw, and tighten gently.
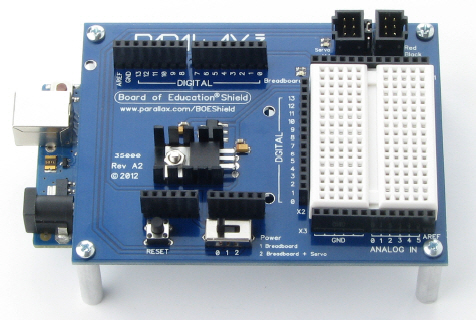
To keep the connected boards up off of the table, we’ll mount tabletop standoffs to each corner of the Board of Education Shield.
- Thread a 1/4″ screw through a corner hole on the Board of Education Shield from the top side.
- Thread a 1″ aluminum standoff onto the screw and tighten gently.
- Repeat until all four standoffs are installed.