Activity 1: Download and Install the Software
Get the Example Code
Arduino programs are called sketches. If you type in all of the example sketches by hand, you’ll develop your programming skills faster. But, sometimes it’s helpful to have tested sketches on hand for troubleshooting circuts or finding bugs. So, all of the complete sketches are provided for your use below.
- Download the Shield-Bot Arduino code
- Save the file to your desktop, and un-zip it before trying to use the sketches in it.
If this is your first time working with the Arduino system, you will need to set up a programming software option: Arduino IDE, Arduino Web Editor, or Codebender : edu.
Getting Started with the Arduino Web Editor
- In your Chrome browser, go to the Arduino website’s Getting Started with the Web Editor page.
- Follow the directions for creating an account, if you do not already have one. If you are under 18 you will need your parent or guardian’s assistance. If you are part of a class, ask your teacher for guidance.
- Follow the directions for installing the Create Agent plugin.
Getting Started with the Arduino IDE Software
Arduino IDE software and drivers install on your Windows, Mac, or Linux computer. You do not need to be online to use it.
- Go to to the www.arduino.cc site’s Getting Started page.
- Follow their instructions to install the Arduino Desktop IDE for your operating system.
Getting Started with Codebender : edu
Codebender : edu is an online programming tool that works on Windows, Mac, Linux, or Chromebook, in a Chrome or Firefox browser session. You need to install a browser plug-in and drivers, and be online to use it. Registration for an account that may be shared in a classroom is required.
- Follow this link to https://edu.codebender.cc and scroll down to obtain a subscription.
- Follow their instructions for registering a new account.
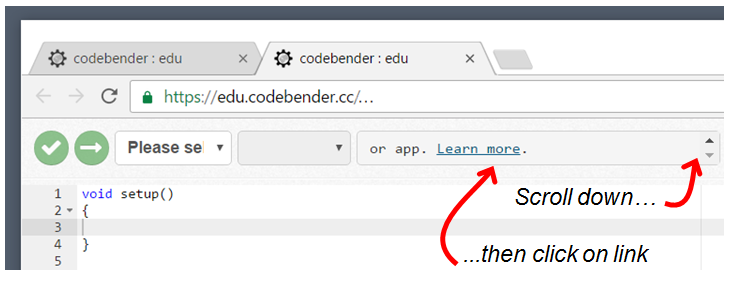
- From your account URL, find the link to the required browser plug-in options. You may have to scroll down in the third field from the left, until you see the “Learn more” link,
- Follow the link, and then select the codebender app for your browser and operating system.