Activity 3: LED Servo Signal Monitors
The high and low signals that control servo motors must last for very precise periods of time. That’s because a servo motor measures how long the signal stays high, and uses that as an instruction for how fast, and in which direction, to turn its motor.
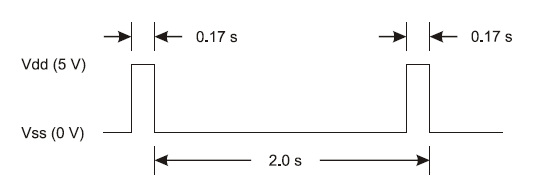
This timing diagram shows a servo signal that would make your Shield-Bot’s wheel turn full speed counterclockwise. There’s one big difference though: all the signals in this timing diagram last 100 times longer than they would if they were controlling a servo. This slows it down enough so that we can see what’s going on.
Example Sketch: ServoSlowMoCcw
- Enter, save, and upload ServoSlowMoCcw to the Arduino.
- Verify that the pin 13 LED circuit pulses briefly every two seconds.
/*
Robotics with the BOE Shield - ServoSlowMoCcw
Send 1/100th speed servo signals for viewing with an LED.
*/
void setup() // Built in initialization block
{
pinMode(13, OUTPUT); // Set digital pin 13 -> output
}
void loop() // Main loop auto-repeats
{
digitalWrite(13, HIGH); // Pin 13 = 5 V, LED emits light
delay(170); // ..for 0.17 seconds
digitalWrite(13, LOW); // Pin 13 = 0 V, LED no light
delay(1830); // ..for 1.83 seconds
}
Your Turn – Two Steps to Servo Signal
Alright, how about 1/10th speed instead of 1/100th speed?
- Reduce delay(170) to delay(17), and delay(1830) to delay(183), and re-upload the sketch.
Is the LED blinking 10 times faster now? Divide by 10 again for a full speed servo signal—we’ll have to round the numbers a bit:
- Change delay(17) to delay(2), and delay(183) to delay(18), then upload the modified sketch.
Now you can see what the servo signal looks like with the indicator LED. The LED is flickering so fast, it’s just a glow. Since the high signal is 2 ms instead of 1.7 ms, it’ll be a little brighter than the actual servo control signal—the light is spending more time on. We could use this signal and programming technique to control a servo, but there’s an easier, more precise way. Let’s try it with LEDs first.