Introducing the Phototransistor
A transistor is like a valve that regulates the amount of electric current that passes through two of its three terminals. The third terminal controls just how much current passes through the other two. Depending on the type of transistor, the current flow can be controlled by voltage, current, or in the case of the phototransistor, by light.
The drawing below shows the schematic and part drawing of the phototransistor in your Robotics Shield Kit. The brightness of the light shining on the phototransistor’s base (B) terminal determines how much current it will allow to pass into its collector (C) terminal, and out through its emitter (E) terminal. Brighter light results in more current; less-bright light results in less current.
![]()
The phototransistor looks a little bit like an LED. The two devices do have two similarities. First, if you connect the phototransistor in the circuit backwards, it won’t work right. Second, it also has two different length pins and a flat spot on its plastic case for identifying its terminals. The longer of the two pins indicates the phototransistor’s collector terminal. The shorter pin indicates the emitter, and it connects closer to a flat spot on the phototransistor’s clear plastic case.
Light Waves
In the ocean, you can measure the distance between the peaks of two adjacent waves in feet or meters. With light, which also travels in waves, the distance between adjacent peaks is measured in nanometers (nm) which are billionths of meters. The figure below shows the wavelengths for colors of light we are familiar with, along with some the human eye cannot detect, such as ultraviolet and infrared.
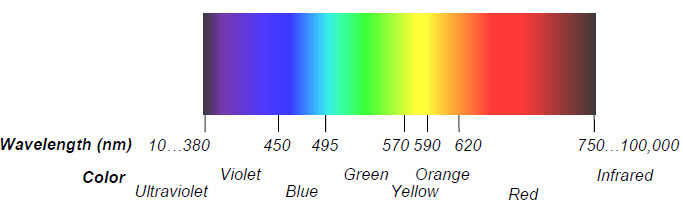
The phototransistor in the Robotics Shield Kit is most sensitive to 850 nm wavelengths, which is in the infrared range. Infrared light is not visible to the human eye, but many different light sources emit considerable amounts of it, including halogen and incandescent lamps and especially the sun. This phototransistor also responds to visible light, though it’s less sensitive, especially to wavelengths below 450 nm.
The phototransistor circuits in this chapter are designed to work well indoors, with fluorescent or incandescent lighting. Make sure to avoid direct sunlight and direct halogen lights; they would flood the phototransistors with too much infrared light.
- In your robotics area, close window blinds to block direct sunlight, and point any halogen lamps upward so that the light is reflected off the ceiling.