The following flowchart describes the final algorithm for creating a circle with a given R:
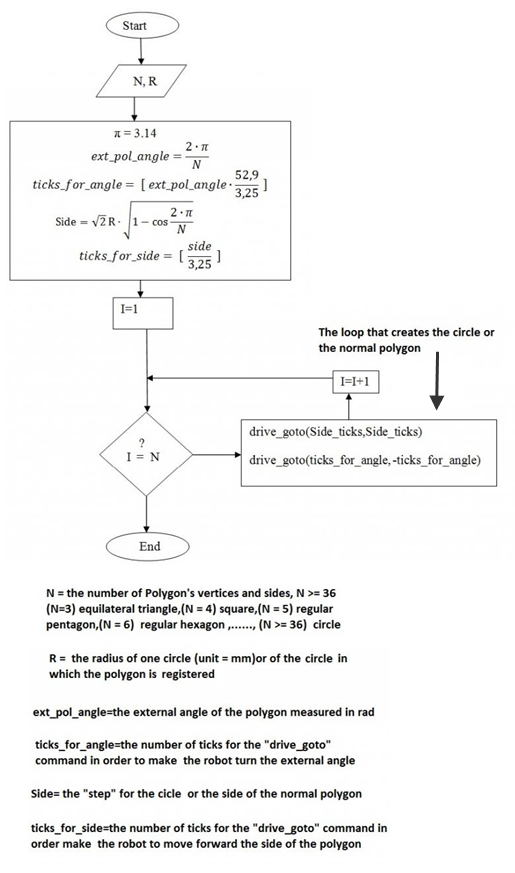
This algorithm also works well for all other regular polygons.
Keep track of variables! The code below uses lowercase variables n and r for the same variables we have been calling N and R so far. The code comments can help you if you get confused.
/*
Final Circle Polygon Algorithm.c
Makes the ActivityBot do a circle or regular polygon
(By Nikos Giannakopoulos)
N = 3 equilateral triangle, N = 4 square, N = 5 regular
pentagon, N = 6 regular hexagon....N = number of polygon's
vertices and sides, N >= 36 circle
R = the radius of one circle (unit in mm) or of the circle
in which the polygon is registered.
*/
#include "simpletools.h" // Include simpletools
#include "abdrive.h"
int main() // Main function
{
float pi, ext_pol_angle,side;
int n = 36; // N = number of polygon's vertices
int r = 150; // R = the radius of the circle in
// which the polygon is registered
// (unit = mm) e.g. r = 150mm
pi = 4 * atan(1); // the number ᴨ = 3.14 tan(ᴨ/4) = 1
ext_pol_angle = 2 * pi / n; // external angle of the polygon in rad
int ticks_for_angle = round(ext_pol_angle * (52.9/2.35)); // number of ticks
// for drive_goto to
// make robot turn the
// external angle
side = sqrt(2) * r * sqrt(1-cos(2*pi/n)); // side length of the regular polygon
int Side_ticks = round(side/3.25); // number of ticks for drive_goto to drive
// the side length of the polygon
for (int i = 1; i <= n; i++) // repeats forward and right turn commands
// N times to complete the polygon shape
{
drive_goto(Side_ticks,Side_ticks); // Move forward
pause(10);
drive_goto(ticks_for_angle, -ticks_for_angle); // Turn right or left
pause(10);
}
}
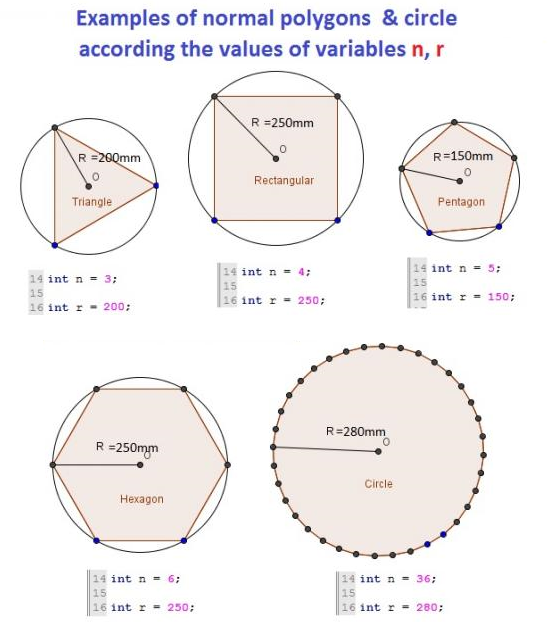
As you can see, the program could also make your ActivityBot form any regular polygon within a circle of radius r. Below are some polygons and circles that you can make with your AcrivityBot by changing the values of variables n and r in the above code.
Try This
- Try altering the code slightly so that the robot moves counterclockwise instead of clockwise. Remember that to go counterclockwise, you need to change make changes to the drive_goto command parameters. Check the bottom of the page on Calcuating Angles of Rotation if you need a refresher on how to do that.