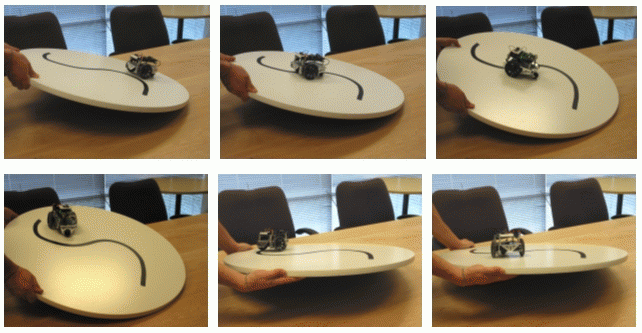
Let's say your Boe-Bot is attempting to navigate terrain with hills and valleys. Depending on how steep the hills are, the Boe-Bot may need to detect whether or not it is about to roll back down the hill. As part of a contest, the Boe-Bot may need to find the top of the hill (or the bottom of a valley) faster than its competitors. The Memsic MX2125 Dual-axis Accelerometer makes all this and more possible, and this activity will show you how.
Figure 1 - Boe-Bot Performing Hill-Climbing Behavior
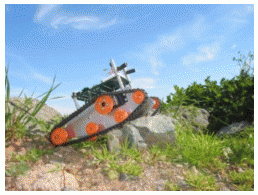
The ability to sense incline and make navigation decisions is also especially important when the Boe-Bot is equipped with the Boe-Bot Tank Tread Kit (#28106). The Boe-Bot Tank Tread Kit Documentation has an example with an accelerometer added to the IR roaming application from Robotics with the Boe-Bot to keep it from trying to climb an obstacle that is too steep and might cause it to flip. The Tank Tread Kit modification is shown in Figure 2.
Figure 2 - Boe-Bot with Tank Tread Modification
Getting Started
If you are new to the BASIC Stamp microcontroller or to programming, it would be a good idea to review Chapters 1-4 in Robotics with the Boe-Bot (#28125).
Parts List
With the exception of the Memsic MX2125 Dual-axis Accelerometer, all the rest of the parts are already included in the Boe-Bot Robot kit.
(1) Fully assembled and tested Boe-Bot Robot (#28132)
(1) Memsic 2125 Dual-axis Accelerometer (#28017)
(2) 220 Ω resistors (#150-02210)
(1) Piezospeaker (#900-00001)
Source Code
Source Code for Boe-Bot Navigation with Accelerometer Incline Sensing