Schematics and Building the Circuits
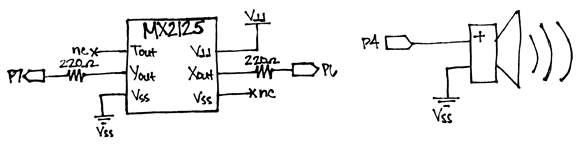
The image below shows the schematic for the Boe-Bot with the accelerometer circuit. The servo and piezo speaker connections are from Robotics with the Boe-Bot (#28125). The connections for the accelerometer are featured in Chapter 3 of Smart Sensors and Applications.
Figure 3 - Schematic for Boe-Bot with Accelerometer
Tilt Axes on the Boe-Bot
It's important to get a feel for how the Boe-Bot's forward/backward and left/right tilt axes relate to the accelerometer's X and Y axes.
- Enter, save, and run BoeBotTiltTest.bs2, and keep an eye on the Debug Terminal as you tilt your Boe-Bot.
- Verify that the piezospeaker beeped for two seconds before the program continued. If not, double-check your program and wiring.
- Try tilting your Boe-Bot to the left and right. Verify that the x-axis values range from -625 to 625, and that they are negative when you tilt the Boe-Bot to the left and positive when you tilt it to the right.
- Next tilt the Boe-Bot as though it is driving downhill, then uphill. Verify that the y-axis values range from -625 to 625, and that they are positive when the Boe-Bot is tilted downhill and negative when the Boe-Bot is tilted uphill.
Example Program – Boe-BotTiltTest.bs2
' BoeBotTiltTest.bs2
' Test accelerometer readings.
'{$STAMP BS2}
'{$PBASIC 2.5}
x VAR Word ' Left/right tilt
y VAR Word ' Forward/backward tilt
DEBUG "Beep!!!" ' Test piezospeaker
FREQOUT 4, 2000, 3000
DEBUG CLS, " x y", CR ' Axis headings
DO ' Begin main routine
PULSIN 6, 1, x ' Get X-axis tilt
PULSIN 7, 1, y ' Get Y-axis tilt
' Instead of measurements that range from 1875 to 3125 with 2500 = no tilt,
' These two statements shift the tilt measurements to range from -625 to 625
' with 0 = no tilt.
x = (x MIN 1875 MAX 3125) - 2500
y = (y MIN 1875 MAX 3125) - 2500
' Display x and y tilt measurements.
DEBUG CRSRX, 0, "(", SDEC3 x, ", ", SDEC3 y, ")", CLREOL
PAUSE 100 ' Pause 1/10 s
LOOP ' Repeat main routine