Program
Follow the steps below to create a program to center the servos.
- In BlocklyProp Solo, create a New Project named
- Name it Center Servos with a Board Type of Propeller FLiP or Project Board
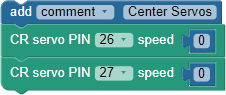
- Place two CR servo PIN speed blocks on the canvas. You can find them in the Servo category.
- Set one block’s PIN dropdown to 26, and the other to 27. Leave the speed values for each block at zero.
- Snap the block with PIN set to 27 underneath the one with PIN set to 26.
- Optionally, snap a comment on top that matches the project name: Center Servos.
- Click Save and save your program to your computer.
Procedure
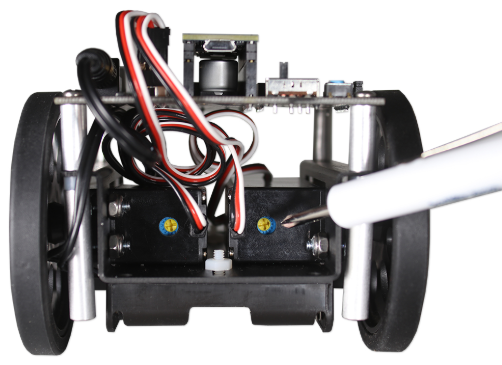
- For each servo, you will make a small adjustment to its set screw. This will match its stay-still behavior to the zero-speed signal sent by a CR servo block.
- Click the Load & Run (Save code to EEPROM) button
 to load the program into your SumoBot. The button looks like this:
to load the program into your SumoBot. The button looks like this: - Set the SumoBot face down on the table so that its wheels do not touch the surface.
- Set the POWER switch to 2. If you don't, the servos will not get any power, and this procedure will not work!

If your servos are new, they should start moving slowly at this point. If they were used in a previous term at your school, they might or might not already be centered, and so may or may not turn.
If you turn the screwdriver slightly in one direction, the servo should speed up, and in the other, it should slow down. It might even stop and then start turning the opposite directions if the set screw passes the center (stay still position) as you adjust it.
CAUTION - BE GENTLE! The set screw is part of a potentiometer and it is very delicate. Do not press hard on the screwdriver, and only turn it slightly and gently.
- Use the Parallax screwdriver’s Phillips end to adjust the set screw in one of the servos.
- Carefully adjust each screw until you find the setting that makes the servo not turn.
- Repeat for the other servo.