As mentioned at the beginning, the more practice you get with maneuvers, the better. So, here are some challenges to help build your maneuver creating and building skills.
Tuning: Straighten Forward and Backward
If your SumoBot curved when you expected it to go straight, the solution is simple: slow down the faster wheel. Here are three short example programs. The top-center one is the test to see if your SumoBot curves. If it curves to the left, the first step is to change the CR servo PIN 27 block’s speed value from 100 to 90. If it curves to the right, the first step is to change the CR servo PIN 26 block’s speed value from 100 to 90.
- Enter and run the first program to see if your SumoBot curves to the right or left.
- If your SumoBot curved, take the first step shown below to correct the curve, and re-test it.
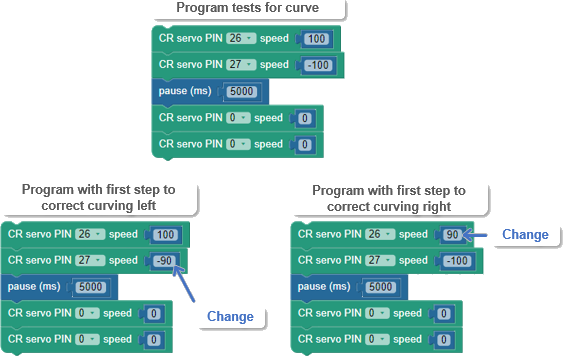
- If the first try corrected it, then great!
- If the SumoBot curves less in the same direction as before, increase your adjustment, to maybe PIN 27 speed -85 to correct left curves or PIN 26 speed 85 to correct right curves.
- Keep on adjusting until you find the best value.
Also, keep in mind that making the SumoBot go perfectly straight is not nearly as important in the Sumo ring as it would be in a dead reckoning contest where every little error adds up.
Pivots and Curves
This activity began with an explanation of the variety of maneuvers two independent drive wheels could execute. Some examples we haven’t tried yet include pivots, where one wheel is set to speed zero, and curves, where the two wheel speeds are different, like one wheel with speed 100, and the other with speed 50.
- Save Forward Left Right Backward Stop as Pivots and Curves.
- Modify the program so that it executes two forward pivots, two backward pivots, two forward curves, and two backward curves.
Shapes
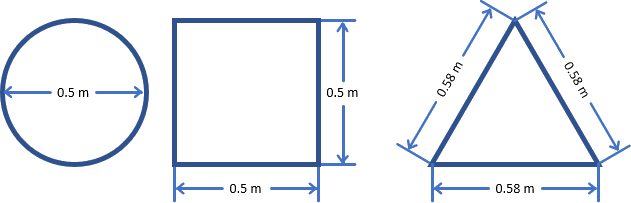
- Use masking tape on a desk or smooth floor to create shapes, then write BlocklyProp programs to make the SumoBot navigate over each shape without going off the tape.