Servos are a special type of motor. They come in two different types: standard and continuous rotation. Standard servos rotate to a specific point (and stay there) based on the input signal. These types are widely used in radio controlled (RC) applications. For the Boe-Bot drive wheels, we’re using the continuous type.
Continuous rotation servos need be calibrated or “centered”. If a servo has not yet been centered, it may turn, vibrate, or make a humming noise when it receives the “stay-still” signal from the microcontroller.
You will use a small Phillips screwdriver to adjust the servos so that they actually stay still while receiving the “stay-still” signal from the BASIC Stamp microcontroller. We call this centering the servos.
You’ll need the Phillips screwdriver that came with your Boe-Bot kit (Phillips with a 1/8 inch (3.18 mm) or smaller shaft).

- Launch the BASIC Stamp Editor that you installed earlier on your PC.
- Connect the USB cable from your computer to the control board.
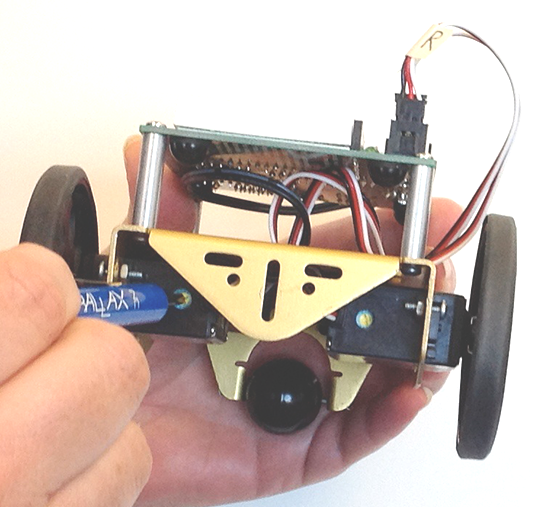
- Place your Boe-Bot up on top of a small box or block so that the wheels are off the ground, and can freely spin without moving the bot.
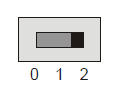
- Set the power switch to position “2”. This will provide power to the circuit board and to the servos.
- Download Center Servos.bs2 program
- Load the program entitled “center servos” into the BASIC Stamp Editor. You should see a short program that looks like this:
DO speedLeft = 0 speedRight = 0 time = 30000 GOSUB Wheel_Speeds LOOP
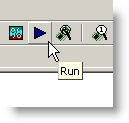
- Click on the Run icon to send this program down into the BASIC Stamp.
Your Boe-Bot may start spinning one or both wheels, in either direction.
- Using the small Phillips screwdriver, adjust the screw on the front of each of the servos so that they come to a complete stop.
This short program is sending the “center off” command to each of the servos, and by fine-tuning both of them, they will be completely stopped when this command is received by the servos.
Your Boe-Bot’s servos should now be calibrated and "centered".