General Multirotor Flying Advice
If possible, have a more experienced operator take the first flight. A more experienced operator will better be able to deal with any issues that arise and ensure that your multirotor is properly configured.
Until you become comfortable with flying your quadcopter, keep it in Stability Mode.
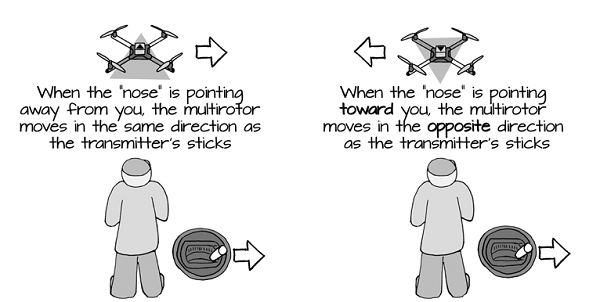
Until you have a few dozen flight hours (which will take you quite a while), keep the quadcopter within a few hundred feet, and always stay within the line of sight. Also, keep the front of the multirotor (it’s nose) facing directly away from you, so you can more easily relate your hand’s motions on the controls to the sUAV’s motion in response. Failing to follow this advice will make flying significantly more difficult.
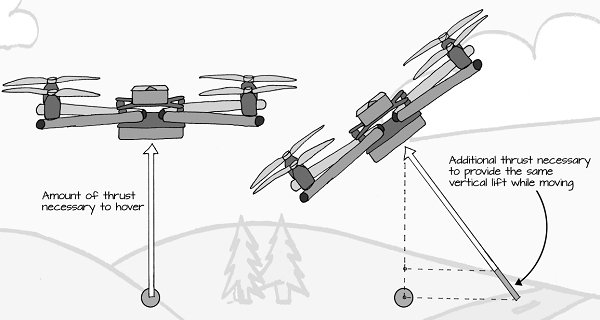
For all rotor-based aircraft (including quadcopters), any directional movement will decrease lift, causing the quad to lose altitude. To keep from dropping, you will need to compensate by slightly increasing the throttle. Stability Mode on the ELEV-8 v3 does this for you automatically (yay!).
Momentum
One of the challenges you will have is that momentum (the tendency for an object to keep moving in the direction is has been moving) causes the multirotor to keep moving in its current direction, even after you stop pushing the stick. For instance, if you push the right stick to the right to make your sUAV fly to the right, it will keep moving that way even if you stop pushing on the right stick. You have to give the right stick a small push to the left to counteract its momentum to stop its rightward movement.
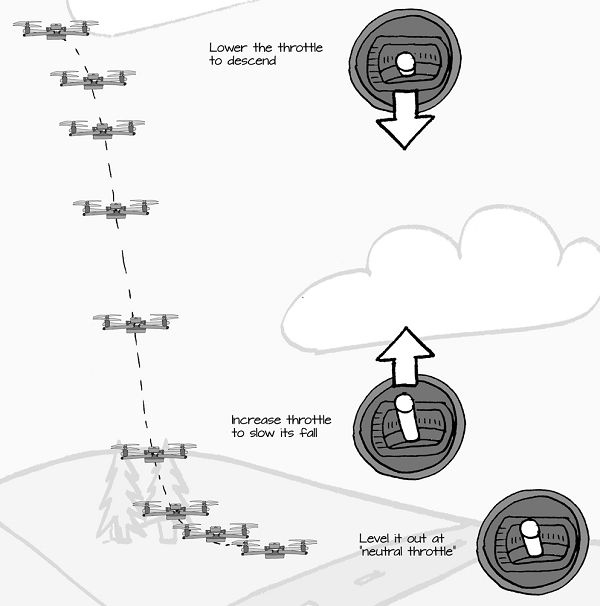
The momentum of the multirotor also requires some throttle correction as it moves up and down. In other words, after you change altitude, you will need to increase or decrease the throttle around “neutral throttle” to enter a stable hover. This is especially true when descending; once the multirotor achieves the desired altitude a swift increase in throttle will be required to offset the momentum of the falling multirotor:
Staying in control
The transmitter’s controls are sensitive, so avoid overreacting or overcompensating - this may take some practice!
All rotor-based aircraft (including quadcopters) are much more stable in ascent (going up), than descent (going down), so be careful to descend slowly, or you may lose control.
If anything goes wrong, just throttle down! If you are learning to fly at a low altitude, a short fall onto a grassy field won’t do much damage to your sUAV, but an out-of-control sUAV can do a lot of damage and harm.
One of the most common causes of a crash is a loss of directional resolution. This happens when you can no longer tell which direction the multirotor is facing or moving—if you don’t know, you cannot effectively control it:
The Ground Effect
Moving air has less pressure than air that is still. This causes something called the Ground Effect. The air moving between your sUAV and the ground creates a slight vacuum that pulls down on your sUAV - therefore requiring more throttle to take off. It can also pull down on your sUAV if you fly within a few feet of the ground. Avoid the ground effect by hovering and flying at least 3 ft (1 m) off the ground.
The Unpleasant Surprise of the Ceiling Effect
This same effect of low pressure air between an sUAV and a flat surface exists in other places, too. walls, ceilings, buildings, and structures can all cause your sUAV to be “sucked in”, causing them to crash and get damaged.
The Role of the Spotter
Flying an sUAV takes a lot of concentration - more even that driving a car. Because you are focused on flying, it is difficulut to see any hazards that may come into your flying space. For this reason, it's highly recommended that you use a Spotter. Spotters are required if you are flying First-Person View (FPV), and strongly recommended for Line-of-sight flying. Your Spotter should know the laws and rules for sUAV flying, and their role is to look out for potential hazards like the Big 4 mentioned in the Safety section of the ELEV-8 v3 Safety tutorials.