The Parallax Continuous Rotation Servos are the motors for your robot, that can be controlled by the programs you create.
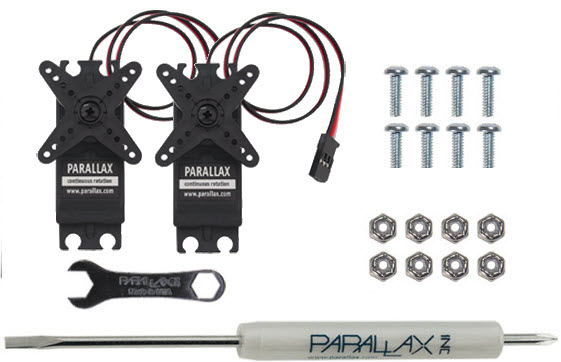
Parts required for each robot
- SumoBot chassis, partly assembled (not shown)
- (2) Parallax Continuous Rotation Servos
- (8) #4-40 3/8" long pan-head machine screws
- (8) #4-40 locknuts
- Parallax combination wrench
- Parallax screwdriver
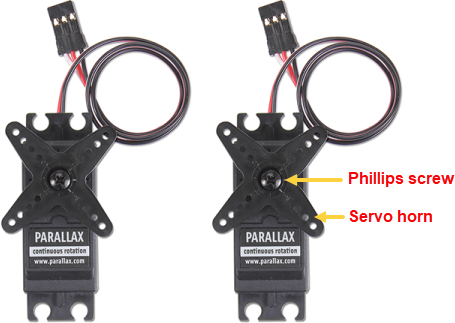
- Find the black Phillips head screw in the center of each servo's horn.
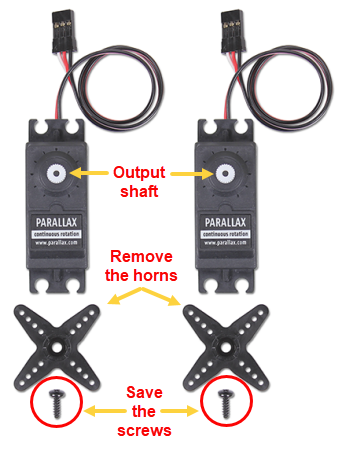
- Using the Parallax screwdriver, remove the black screw from the center of each servo horn and SAVE THE SCREWS! You will need them to attach the wheels later on.
- Gently pull the servo horn off of each servo's output shaft and set it aside.
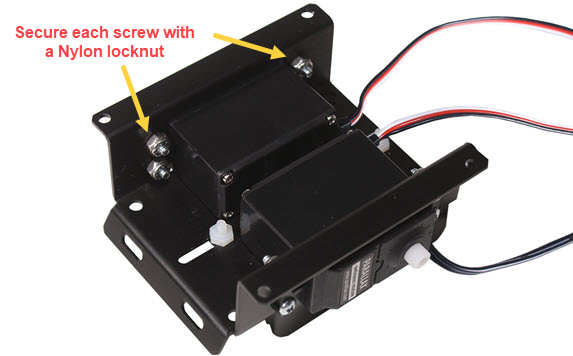
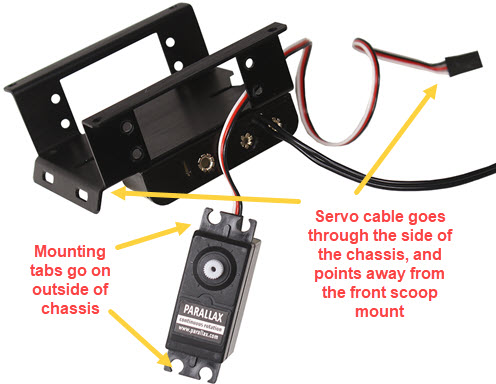
- Slide a servo motor into the chassis so its mounting tabs rest on the outside of the chassis, and the wires are pointing away from the angled scoop mount.
- Use the closed end of the wrench to hold the locknuts securely.
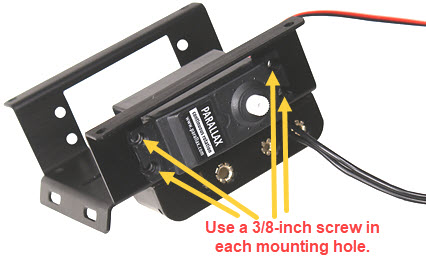
- Using four #4-40 3/8” pan-head machine screws and locknuts, attach the servo motor to the chassis.
- Repeat with the other servo motor