Project By: Vale T
Level: Beginner
Hours to Complete: 1-2
Skills Required: Propeller C programming, building circuits on a breadboard, simple mechanical assembly
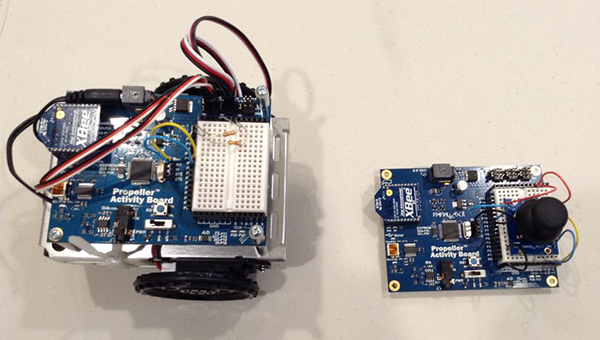
Have you ever wanted to drive your ActivityBot like you would an RC car? This project will let you control your ActivityBot remotely using a joystick mounted on an Activity Board.
This is a fun project that one can accomplish within an hour or two.
For this project, the following should already be completed:
- You have assembled the standard ActivityBot. If not, follow this link to assemble it and learn the basics of programming.
- You have an Activity Board with a 2-Axis Joystick installed. If not, follow this link to assemble and test the Joystick on the Activity Board’s breadboard.
What’s Required
- Access to a computer to program the ActivityBot robot and Activity Board
- (1) or (2) USB cables (#805-00006) (only 1 is required)
- (2) XBee modules of the same series (#32404 or #32405 are examples)
- (1) 4 or 5-AA Battery Holder (#700-00038 or #753-00007), plus AA batteries
- (4) Jumper wires
Curriculum
- 1 Section
- 2 Lessons
- Lifetime
Expand all sectionsCollapse all sections
- Joystick-Controlled ActivityBot Project2
