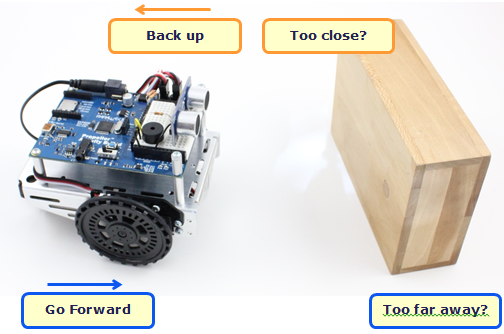
Instead of finding and avoiding obstacles, this next project makes the ActivityBot follow a target. The same sensor system, using different code. The code checks for the desired distance, and if the object is further away than that, the ActivityBot moves forward. If the object is closer than the desired distance, the AcitivityBot moves backward. If the object’s distance is equal to the desired distance, the ActivityBot will maintain its position.
Following Objects
This example makes the ActivityBot try to keep a 32 cm distance between itself and an object in front of it. With no object detected, the robot will go forward until it finds one, then maintain that 32 cm distance. If you pull the object away from the ActivityBot, it will go forward again to catch up. Likewise, if you push the object toward it, it will back up to restore that 32 cm distance.
- In your BlocklyProp account, create a new project named Push Ping.
- Build the project shown below.
- Be sure to set the Robot initialize block's dropdown to your particular robot: ActivityBot or ActivityBot 360° before you save it.
- Connect the ActivtiyBot to your computer and set the power switch to 1.
- Set the COM port, and click Load and run (save code to EEPROM).
- Disconnect the ActivityBot from your computer, then hold down the reset button while setting the power switch to 2.
- Set the ActivityBot on the floor and put your hand in front of it, keeping still. Your ActivityBot should move to 32 cm from your hand and maintain that distance.
- Try moving your hand toward and away from the ActivityBot. It should respond to maintain that 32 cm distance.
How it Works
The program declares five variables: distance, setPoint, errorVal, kp, and speed.
- Distance stores the measured distance to an object in front of the ActivityBot.
- setPoint stores the distance the ActivityBot should try to maintain between itself and an object it detects in front of it.
- errorVal stores the difference between the measured distance and the desired setPoint distance.
- kp stores a proportionality constant; errorVal can be multiplied by kp for a speed that will help maintain the setPoint distance.
- Speed stores the result of kp x errorVal.
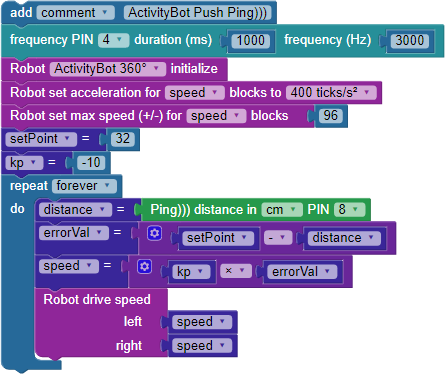
The program starts off with the familiar comment block for the project title and frequency out block for the brownout indicator piezospeaker on P4.
After the required Robot ActivityBot initialize, two more blocks contribute to the robot's behavior. Robot set acceleration is set to 400 ticks/s2 which will help cushion sudden changes in speed. Robot drive max speed 96 makes sure that the Robot drive speed block caps its left and right inputs at +/-96, even if the attached speed variable exceeds 96 during runtime.
Two set variable blocks with number values attached come next: setPoint = 32 and kp = -10. These values do not change during runtime.
The rest of the code is inside a repeat forever block. This routine makes the ActivityBot maintain a distance between itself and the target object by repeating four steps very rapidly:
- Get the measured distance with the block Ping))) distance in cm PIN 8.
- Calculate the difference between the desired and measured distance with errorVal = setPoint – distance.
- Calculate the speed needed to correct any differences between the desired and measured distance with speed = kp x errorVal.
- Drive both wheels at the calculated speed (which is capped at a the Robot drive max speed 96).
Did You Know?
An automated system that maintains a desired physical output level is called a control system. In the case of our ActivityBot, maintained level is the distance between itself and the object in front of it. Many control systems use a feedback loop to maintain the level, and our ActivityBot is a prime example of this. The measured distance is fed back into the system and compared against the set point for calculating the next speed, and this happens over and over again in a process called a control loop.
Engineers use drawings like this block diagram to think through a control loop’s design and also to convey how it works to technicians and other engineers. If the set point (distance the ActivityBot tries to maintain) is 32 and the measured distance is 38, there is an error value. This error value is the set point – measured distance. That’s 32 – 38 = -6. This error is multiplied by a proportionality constant (kp) for an output that’s the speed to correct the error this time through the loop. That’s speed = kp x error value, or 60 = -10 x -6.
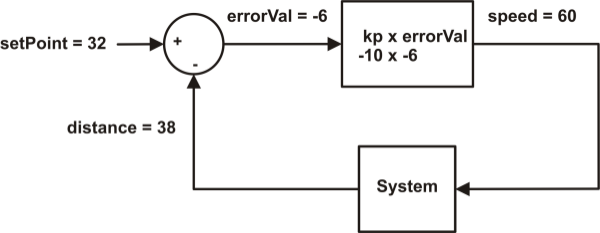
The circle is called a summing junction (for addition or subtraction), and the rectangular blocks designate operations that can vary. In this example, the top one is a proportional control block that multiplies error by a proportionality constant. The System block represents things we do not necessarily have control over, like if you move the object toward or away from the ActivityBot. Other common control blocks that were not used in this example are Integral, which allows corrections to build up over loop repetitions, and Derivative, which responds to sudden system changes.
Try This
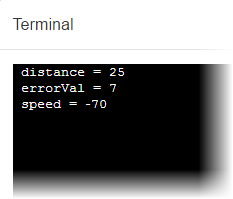
It’s instructive to watch the relationship between errorVal and speed as the value of distance changes. We can use the Terminal to do this.
- IMPORTANT: Set the ActivityBot's power switch to 1 so its wheels cannot move before you connect it to your computer.
- Save a copy of your project and name it Push Ping Try This.
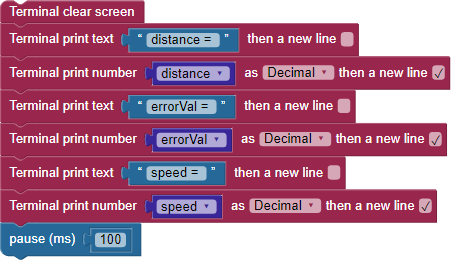
- Add the Terminal blocks and pause block shown below to your project's repeat forever loop, below the Robot drive speed block.
- Save the program and click the Run once button.
- Place your hand in front of the ActivityBot and watch the values in the Terminal window change.
- Can you move your hand far enough so that the speed is greater than 96? Close enough so that it is less than -96? This shows the utility of the Robot max speed block.
- Can you hold your hand in just the right place so that speed = 0? What are errorVal and distance equal to then?
This modified project is for looking at data, not for navigation! Go back to Push Ping, or comment out the Terminal and pause blocks, if you want to return to the navigation activity.
Your Turn
There are lots of values to experiment with here. For example, if you change the setPoint variable from 32 to 20, the ActivityBot will try to maintain a distance of 20 cm between itself and an object in front of it. The value of kp can be increased to make it go faster to correct with smaller error distances, or slower to correct over larger error distances.
- Adjust the values of setPoint and kp to see what happens to the performance.
- Make notes of what you tried and how the ActivityBot responded. What values of setPoint and kp seem optimal to you?
If you decrease the Robot set acceleration value, it will cushion the changes but could cause it to respond so slowly that it runs into the object. If you increase it, it will respond more abruptly. Too large, and it could change direction so fast that it could eject the Ping))) sensor from the breadboard.
- Adjust the Robot set acceleration value downward to smooth out motions, or upward to make them more abrupt.
- Keep experimenting with values as you search for the performance that seems best to you.
- Again, make notes of what you tried and how the ActivityBot’s performance responded.
Would increasing the Robot drive max speed help the ActivityBot keep up with a retreating object? Could decreasing Robot drive max speed too much hamper its response?
- Experiment with the Robot drive max speed setting to see the effect of increasing and decreasing it.