Understanding Gain
Once you have flown your ELEV-8 v3 for a few hours and have a good feel for how it responds, you may want to adjust the gains for each of its flight controls. Adjusting the gains of your ELEV-8 v3 can make it more responsive for experienced operators or soften the controls for gentler, smoother performace. It is possible to over- or under- adjust the gain, causing flight that is too sluggish or even an unwanted oscillation.
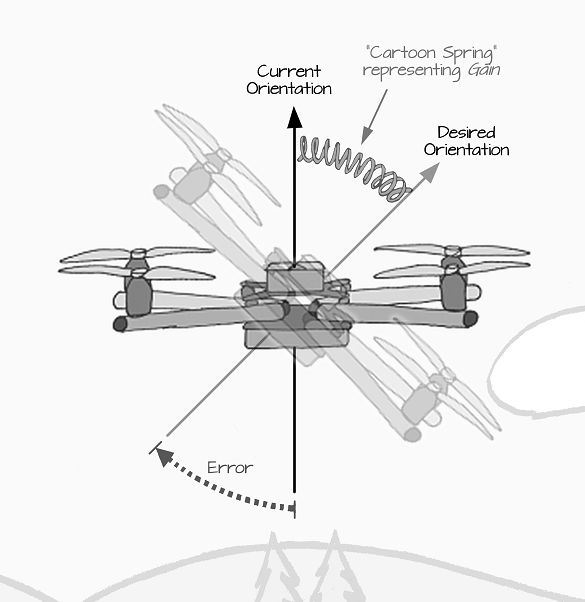
To understand how control gain works, let's use an analogy. First, it is helpful to understand there are two “orientations” that the ELEV-8 v3 is continually updating within the Flight Controller: its current orientation and the operator’s desired orientation. For instance, if the ELEV-8 v3 is hovering, and the operator pushes the right stick to the right, the new desired orientation is a clockwise roll to the right:
Adjusting the Gain with the Parallax GroundStation
The Flight Controller firmware comes with a set of default constants for the five different gain adjustments available: Yaw, Pitch, Roll, Ascent (Throttle), and Altitude. With this procedure, the GroundStation software uploads constants to the Flight Controller's EEPROM. Then, the firmware will use these constants, specific to your very own ELEV-8 Flight Controller, instead of the defaults while flying. This will improve overall flight performance.
Reloading the ELEV-8 Flight Controller firmware will not over-write the calibration settings you create with this procedure. To completely erase these (caution - and all!) calibration settings, see the Factory Default option under the System Setup tab.
- Connect your ELEV-8 v3 to your computer, open the GroundStation, and make sure that your ELEV-8 v3 is shown as connected.
- In the Ground Station software, click on the “Flight Control Setup” Tab. You will see this screen:
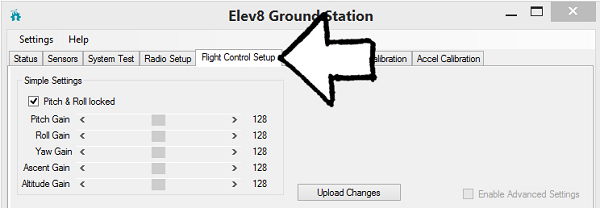
Pitch and Roll Gain
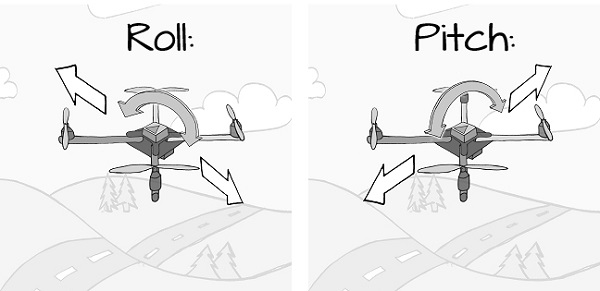
Determining the best values to use for the Roll Gain and Pitch Gain is often a matter of preference, and it will likely take some trial-and-error over multiple flights to determine the best values for your ELEV-8 v3 or multirotor.
One way to help determine whether a value is pereferable is to set Roll to an untested value and Pitch to a known good value, and compare them in flight using the left/right and forward/back of your transmitter's right stick.
Once you've decided what gain value works best, It is recommended that you keep the Roll Gain and Pitch Gain values the same for the ELEV-8 v3 because it has an "X" configuration (its 4 motors are all the same distance from each other). If your multirotor is physically different (for instance, long and narrow), it may require different settings for Roll and Pitch.
To set the Roll Gain and Pitch Gain:
- Pitch & Roll Locked (default is checked) - When checked, this will cause the Pitch Gain and Roll Gain sliders to move together, to help you give them the same value.
- Pitch Gain and Roll Gain (default is 128) - These sliders are used to set the gain values for Pitch and Roll respectively. Use your cursor or arrow keys to change the value on the sliders.
Yaw Gain
Yaw Gain (default is 128) - The Yaw Gain slider sets the amount of gain on the control system that helps your ELEV-8 v3 or multirotor rotate in place:

Altitude and Ascent Gain
Altitude and Ascent Gain apply only to Alititude-Hold mode which is NOT currently enabled at this time (ELEV-8 Flight Controller firmware 1.0.2).
(Planned) In Alititude-Hold mode, there are two states: 1) Holding 2) Ascending/Descending. With the throttle stick above or below center, an ascent rate is computed and the Ascent Gain controls how much to adjust the throttle to try to keep the ELEV-8 v3 or multirotor at the computed ascent/descent rate. When the throttle is centered, the flight controller determines the current altitude and uses the Altitude Gain to control how much ascent/descent is required to hold that altitude. The calulated ascent/descent rate is then fed into the ascent rate control that uses the Ascent Gain.
- Change the Gain settings as desired.
- Click the "Upload Changes" button to send them to your ELEV-8 Flight Controller EEPROM.