In many robotics contests, more precise robot navigation means better scores. One popular entry-level robotics contest is called dead reckoning. The entire goal of this contest is to make your robot go to one or more locations and then return to exactly where it started.
You might remember asking your parents this question, over and over again, while on your way to a vacation destination or relatives’ house:
“Are we there yet?”
Perhaps when you got a little older, and learned division in school, you started watching the road signs to see how far it was to the destination city. Next, you checked the car’s speedometer. By dividing the speed into the distance, you got a pretty good estimate of the time it would take to get there. You may not have been thinking in these exact terms, but here is the equation you were using:
U.S. customary units example: If you’re 140 miles away from your destination, and you’re traveling 70 miles per hour, it’s going to take 2 hours to get there.
Metric units example: If you’re 200 kilometers away from your destination, and you’re traveling 100 kilometers per hour, it’s going to take 2 hours to get there.
You can do the same exercise with the BOE Shield-Bot, except you have control over how far away the destination is. Here’s the equation you will use:
- Enter, save, and run ForwardOneSecond.
- Place your BOE Shield-Bot next to a ruler.
- Make sure to line up the point where the wheel touches the ground with the 0 in/cm position on the ruler.
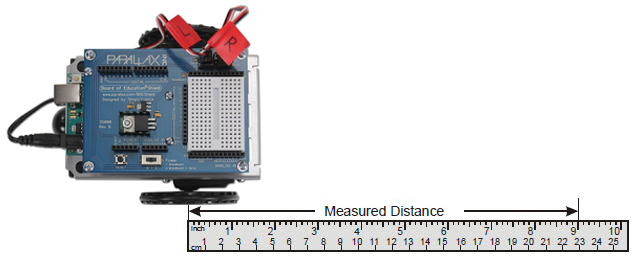
- Press the Reset button on your board to re-run the sketch.
- Measure how far your BOE Shield-Bot traveled by recording the measurement where the wheel is now touching the ground here:_______________ (in or cm).
// Robotics with the BOE Shield - ForwardOneSecond
// Make the BOE Shield-Bot roll forward for one seconds, then stop.
#include <Servo.h> // Include servo library
Servo servoLeft; // Declare left and right servos
Servo servoRight;
void setup() // Built-in initialization block
{
tone(4, 3000, 1000); // Play tone for 1 second
delay(1000); // Delay to finish tone
servoLeft.attach(13); // Attach left signal to pin 13
servoRight.attach(12); // Attach right signal to pin 12
// Full speed forward
servoLeft.writeMicroseconds(1700); // Left wheel counterclockwise
servoRight.writeMicroseconds(1300); // Right wheel clockwise
delay(1000); // ...for 1 second
servoLeft.detach(); // Stop sending servo signals
servoRight.detach();
}
void loop() // Main loop auto-repeats
{ // Empty, nothing needs repeating
}
The distance you just recorded is your BOE Shield-Bot’s speed, in units per second. Now, you can figure out how many seconds your BOE Shield-Bot has to travel to go a particular distance.
Inches and centimeters per second
The abbreviation for inches is in, and the abbreviation for centimeters is cm. Likewise, inches per second is abbreviated in/s, and centimeters per second is abbreviated cm/s. Both are convenient speed measurements for the BOE Shield-Bot. There are 2.54 cm in 1 in. You can convert inches to centimeters by multiplying the number of inches by 2.54. You can convert centimeters to inches by dividing the number of centimeters by 2.54
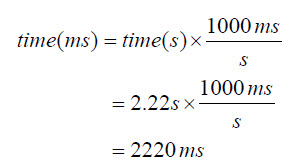
Keep in mind that your calculations will be in terms of seconds, but the delay function will need a parameter that’s in terms of milliseconds. So, take your result, which is in terms of seconds, and multiply it by 1000. Then, use that value in your delay function call. For example, to make your BOE Shield-Bot run for 2.22 seconds, you’d use delay(2220) after your writeMicroseconds calls.
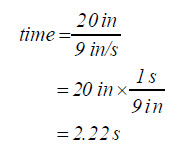
U.S. customary units example: At 9 in/s, your BOE Shield-Bot has to travel for 2.22 s to travel 20 in.
Metric units example: At 23 cm/s, your BOE Shield-Bot has to travel for 2.22 s to travel 51 cm.
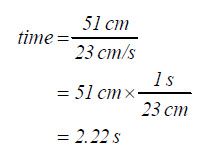
Both examples above resolve to the same answer:
So, use delay(2220) after your writeMicroseconds calls:
servoLeft.writeMicroseconds(1700); servoRight.writeMicroseconds(1300); delay(2220);
Your Turn – Your BOE Shield-Bot’s Distance
Now it’s time to try this out with distances that you choose.
- Decide how far you want your BOE Shield-Bot to travel.
- Use the equation below to figure out how many milliseconds of forward travel you need for that distance:

- Modify ForwardOneSecond to make your BOE Shield-Bot travel forward the amount of time that you determined, and try it out. How close does it come?
Increase the accuracy of your BOE Shield-Bot distances with devices called encoders which count the holes in the BOE Shield-Bot’s wheels as they pass.