The cyber:bot wheels are available as pairs from the Parallax store. Since narrow wheels won’t work on dirt, snow or ice I made some modifications to them. Using hot glue and 1-inch long screws, I created a traction control system. This modification can easily be done within an hour.
The instructions for creating a pair of traction control wheels are:
- Remove the wheels from the cyber:bot (or get another pair) by loosening the small black servo spline screw and pulling the wheel off the servo.
- Remove the black O-ring from the wheel perimeter.
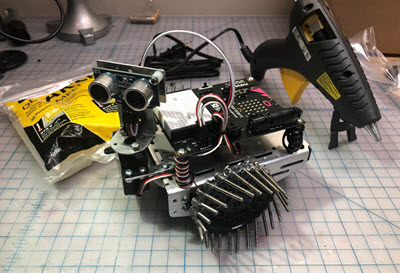
- Hot glue screws into the slots around the wheel.
- Attach the wheels to the cyber:bot using the small black servo spline screws.
The tests worked well! The cyber:bot had more flotation and traction on the snow though the wheels picked up ice and dirt along the way. A four-wheel, skid-steer robot would be more effective with these wheels. See the video highlights below!
Warning! Try this at your own risk! Always wear eye protection when working with hot glue guns. If you are trying snowy conditions, make sure your cyber:bot body and electrical components don’t get wet.