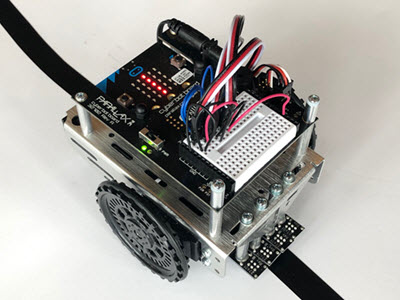
This tutorial shows you how to add an array of four QTI sensors to your cyber:bot. These sensors can differentiate between dark and light surfaces. With a Python program, your cyber:bot robot can use the QTI sensors to follow a black electrical tape line on a light background. This tutorial provides a basic program you can use on a simple track with the cyber:bot’s standard Continuous Rotation Servos. The same code example could also be used with the High Speed Continuous Rotation Servo.
Before You Start
This project assumes you already have some experience with the cyber:bot tutorial series. At a minimum, work through these first:
- Prerequisite(s):
- Get Started with micro:bit and Python
- Writing micro:bit Programs
- Add Modules to Your micro:bit
(From the Adding a Module to the micro:bit Filesystem to the end of the page. Make sure to watch the video too.)
- Main Lessons:
What's Needed
- A fully built and tested cyber:bot (#32700)
- A QTI Line Follower AppKit (#28108)
- A 3/4 inch black line on a white surface.
Track Options
- Print out this line-following tracks PDF on an inkjet or laser printer and copy paper (NOT with photo printing paper and ink); or
- Make a track on white poster board, foam core board, or a smooth, light floor with black electrical tape (the vinyl variety works well). This is the preferred option because it provides so much flexibility in configuration.
After You Finish
You will be ready to combine QTI line following with other sensors for more advanced projects which can be done individually or in the classroom. Some of the ideas include:
- Upgrading the cyber:bot to use the High Speed Continuous Rotation Servos (#900-00025) to move twice as fast
- Adding breaks in the line, ramps, or obstacles which may only be detected with the Ping))) Ultrasonic Sensor (#28015) or Ping))) Ultrasonic Laser (#28041)