What it’s about
In a previous tutorial, the cyber:bot used whiskers to get around, but they only detect obstacles when the robot bumps into something. Wouldn’t it be better if the cyber:bot could just “see” objects and then decide what to do about them?
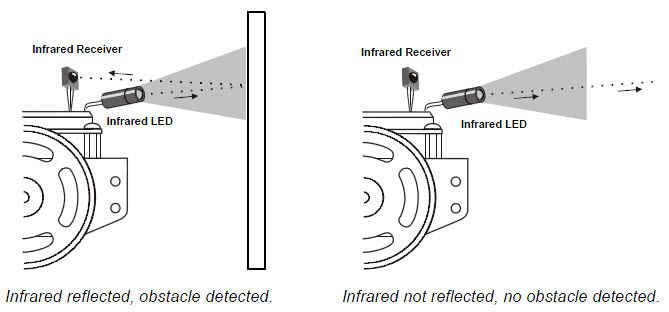
Well, that’s what it can do with infrared headlights and eyes like the ones shown below. Each headlight is an infrared LED inside a tube that directs the light forward, just like a flashlight. Each eye is an infrared receiver that sends the micro:bit module high/low signals to indicate whether it detects the infrared LED’s light reflected off an object.
Before you start
You will need:
- The cyberbot library modules ready to use with your micro:bit software
- A fully assembled cyber:bot robot
- Components from your cyber:bot kit’s electronics pack
- White poster board or paper - not included
- Black electrical tape or flat black tempera or poster paint - not included
- Infrared remote, or another cyber:bot, to generate infrared interference - not included
- ruler - not included
After you finish
You will then be ready to combine infrared navigation with other cyber:bot capabilities. You might also be interested in the project Control your cyber:bot with an Infrared TV Remote.